 MUM-T 有無人 複合戰鬪體系
MUM-T 有無人 複合戰鬪體系
有?無人 複合戰鬪體系
(Manned-Unmanned Teaming, MUM-T)는 小型 攻擊 헬기 操縱士가 任務 遂行 中 危險 地域 偵察을 위해 多數의 無人機를 呼出하고 操縱士가 헬기와 함께 無人機를 同時에 操縱, 統制하여 入手한 情報를 地上 部隊와 共有하는 體系이다. 이를 통해 우리 軍 兵力의 安全은 勿論 作戰 遂行 成功率도 높일 수 있는 시스템이다.
[1]
發展 過程
[
編輯
]
| 2000 初盤~2000 中盤
|
MUM-T 槪念 登場 / 情報 蒐集 및 監視 任務
|
| 2000 中盤~2010 初盤
|
無人機 發展 / 有?無人 統合力 强化
|
| 2010 中盤~現在
|
無人機 自律性 增加 / 任務 修行力 增加
|
| 現在~
|
任務 多樣化(攻擊, 對共 任務, 電子戰, 通信 等)
|
1.初期 段階 (2000年代 初盤)
[
編輯
]
無人 航空機의 登場과 함께 有無人 複合戰鬪體系의 槪念이 처음 提示되었다. 無人 航空機는 主로 情報 蒐集 및 監視 任務에 使用되었으며, 初期에는 誘引 航空機와의 統合이 相對的으로 制限되어 있었다.
[2]
2.統合 및 協力 增進 (2000年代 中盤 - 2010年代 初盤)
[
編輯
]
이 時期에는 無人 航空機의 技術 發展과 함께 誘引 航空機와의 統合이 增加했다. 無人 航空機가 더 많은 任務를 擔當하고, 誘引 航空機는 如前히 操縱士의 統制 下에 있었지만 相互 協力이 强化되었다.
[2]
3,自動化 및 人工知能 (2010年代 中盤 - 現在)
[
編輯
]
最近 몇 年 동안은 人工知能과 自動化 技術의 發展으로 武人 航空機의 自律性이 增加하고 있었다. 이로써 有?無人 複合戰鬪體系는 더 複雜한 任務를 遂行하고, 實時間으로 狀況을 判斷하여 意思決定을 내릴 수 있게 되었다.
[2]
4.다양한 任務 遂行 (現在)
[
編輯
]
現在 有?無人 複合戰鬪體系는 偵察 및 情報 蒐集 뿐만 아니라 攻擊, 對共 任務, 電子戰 및 通信 支援 等 다양한 任務를 遂行할 수 있는 能力을 갖추게 되었다. 이러한 시스템은 軍事的 用途뿐만 아니라 災難 對應, 警備, 許가 없는 地域의 監視 等 多樣한 分野에서도 活用될 수 있다.
[2]
重要性
[
編輯
]
美 陸軍은 'MUM-T'와 關聯하여 有無人 協同의 槪念을 强調하며, 이를 통해 戰鬪力의 上昇 要因으로 作用한다고 言及하였습니다. 有無人 複合體系는 機動 武器體系 및 支援體系 全體를 超連結하여 未來의 다양한 威脅에 빠르고 致命的으로 對應하는 體系이다.
效果
[
編輯
]
1) 複雜한 戰場 環境에서도 戰場 狀況認識 能力의 向上 및 指揮統制 與件 保障
2) 有無人 體系에서 獲得한 情報를 實時間으로 連繫하여 戰鬪 效率性 向上
3) 危險地域에서의 戰鬪 時 有無人 體系의 適切한 配置로 戰鬪員의 生存 可能性 向上
任務遂行槪念
[
編輯
]
對共制壓
[
編輯
]
- 對共制壓 任務遂行視 誘引戰鬪機는 敵에게 探知되지 않도록 센서를 手動으로 運用
- 無人機는 유인용으로 敵 防空레이더 및 地對空미사일을 誘導하고 敵의 미사일을 消耗
저피탐기 浸透支援
[
編輯
]
- 無人機는 저피탐기 浸透時 敵 센서에 對해 電磁氣 攻擊任務를 遂行
- 敵 센서에 對한 電磁氣 攻擊은 敵의 楮皮貪 探知能力을 低下시켜 楮皮貪 浸透 能力 및 生存性 向上에 寄與
戰鬪機 掃蕩
[
編輯
]
- 誘引기와 팀을 構成하여 戰鬪機 掃蕩 任務를 遂行
- 有人機보다 前方에 展開하여 有人機 센서 探知距離 밖에서 먼저 敵機 探知
高威脅環境 早期警報
[
編輯
]
- 防空體系의 密度가 높은 高威脅 環境에 展開하여 威脅을 早期에 警報
爆擊機 護衛 및 打擊
[
編輯
]
- 爆擊機 浸透 및 打擊 任務 遂行時 無人機가 空對空 威脅으로부터 爆擊機를 保護하여 生存性을 保障
前方/防禦 提供 CAP
[
編輯
]
- 有人機에 無人機가 팀을 構成하여 前方 防禦 및 提供/哨戒(CAP) 任務 遂行
核心技術
[
編輯
]
HSA-DM(Holistic Situation Awareness - Decision Making)
[
編輯
]
同時에 여러 狀況 인지/처리, 實時間 經路生成, 生存을 위한 自律化 協을 통해 決定能力을 增大
IME(Integrated Mission Equipment)
[
編輯
]
FLV
에서 要求되는 複雜해지고 빠른 變化에 聯動시킬 수 있는 시스템 構造設計
MSAD/MOSA(Mission System Architecture Decision/Modular Open Systems Architecture)
[
編輯
]
開放型救助 採擇하여 기용성 增大 및 迅速하게 運用裝備에 適用, 再使用性 및 相互運用性 强化
SUMIT(Synergistic Unmanned-Manned Intelligent Teaming)
[
編輯
]
模擬環境을 통해
FLV
에서 要求되는 시나리오를 迅速하게 具現 및 評價
SAINT(Survivabillity Against Integrated and Networked Threats)
[
編輯
]
敵의 高度化로 네트워크화된 威脅을 避하거나 破壞함으로써 生存性을 增大
MAA(Mission Adaptive Autonomy)
[
編輯
]
操縱士가 任務에 더 集中할 수 있도록 시스템이 障礙物을 避해 自動飛行
UAS 相互運用性(STANAG 4586)
[
編輯
]
北大西洋 條約機構(NATO)
는 會員國들에게 共通的인 軍事 또는 技術的 節次를 提供하기 위해 1998年
UAV
시스템 相互 운용성을 위한 標準인STANAG(Standardization Agreement) 4586을 規定했다. 이 規定은 아키텍쳐, 인터페이스, 通信 프로토콜, 데이터 要素, 그리고 메시지 形式 等을 定義했다. STANAG 4586은
相互運用性
水準(LOI, Levels of Interoperability)을 다섯 가지 레벨로 整理했다.
[3]
■ 레벨 1 : UAV 關聯 데이터 및
메타데이터
의 間接的인 受信/送信
■ 레벨 2 : UAV 關聯 데이터 및
메타데이터
의 直接的인 受信/送信
■ 水準 3 : 飛行體가 아닌 UAV 搭載物의 制御와 모니터링
■ 레벨 4 : 離陸 및 着陸을 除外한 UAV 制御와 모니터링
■ 레벨 5 : 離陸 및 着陸을 包含한 UAV 制御와 모니터링
MUM-T 現況
[
編輯
]
有?無人 複合戰鬪體系(MUM-T)는 크게 3가지로 나눌 수 있다.
UGV
나 無人 裝甲車 等을 利用하는 地上 MUM-T, 戰鬪機나 헬기, UAV 等을 使用하는 航空 MUM-T, 無人 潛水合이나 드론 等을 使用하는 海上 MUM-T로 나눌 수 있다.
[2]
= 1. 地上 MUM-T =
[
編輯
]
運用槪念 및 特徵
[
編輯
]
效率的인 戰鬪를 위해서 視角을 基盤으로 하여 自律的으로 表迹을 探知하고, 使用者가 事前에 指定한 標的을 使用해 識別 時間을 短縮하는 自律 遠隔 交戰 시스템(Autonomous Remote Engagement System)을 採擇했다. 그러나 美 陸軍의 目標는 自動으로 指定되지만, 컴퓨터가 아닌 兵士들이 방아쇠를 당길 時點을 決定할 것이라고 밝혔다. 그리고 다음과 같은 3가지 效果를 가져올 수 있다고 하였다.
[3]
1) 다양한 有無人 體系 間 共同 作戰을 통해 複雜한 戰場 環境에서도 戰場 狀況認識 能力 向上 및 可視化를 통한 指揮官의 指揮統制 與件을 保障할 수 있다.
2) 有無人 體系에서 獲得한 標的 情報와 武裝을 實時間으로 連繫한 적 威脅分析 및 最適의 打擊手段 推薦으로 戰鬪 效率性을 높일 수 있다.
3)그리고 危險地域 戰鬪 時 有無人 體系의 適切한 配置를 통한 作戰 遂行으로 戰鬪員의 生存 可能性 向上 및 單一 體系 作戰 以上의 시너지를 創出할 수 있다.
 美 陸軍 MUM-T 關聯 試驗들
美 陸軍 MUM-T 關聯 試驗들
 美 陸軍 MUM-T 戰略 說明도
美 陸軍 MUM-T 戰略 說明도
海外 事例
[
編輯
]
 PACMAN-I
PACMAN-I
? PACMAN-I
[
編輯
]
美 陸軍은 地上에서도 MUM-T를 推進하고 있다. 地上에서의 MUM-T를 MUM-T(Ground)로 부르고 있다. 美 陸軍은 2016年 7月 하와이에서 太平洋 誘引-無人 構想 PACMAN-I(Pacific Manned Unmanned-Initiative)라는 地上型 MUM-T를 試驗했다.
PACMAN-I에서는 정글 環境에서 作戰하는 重大級 部隊를 위한 要素를 評價했다. 이 試驗은 美 陸軍 電車, 自動車 硏究, 開發 및 엔지니어링 센터
TARDEC
(Tank Automotive Research, Development and Engineering Center)가 主導했다. PACMAN-I에는 第25 步兵師團 兵士들이
Kobra 710
地上로봇(UGV)을 運用한다.
 RIPSAW M5
RIPSAW M5
PACMAN-I 當時 險한 정글 때문에 MUM-T(Ground)의 活用度는 낮았지만, 兵士들은 無人航空機를 使用하여 敵에 對한 情報를 獲得한다. 이를 利用하여 空甁 小隊가 經路 偵察, 小型 障礙物 突破, NBC(Nuclear, Biological, Chemical) 武器 探知 等을 遂行한다.
? RCV-M
[
編輯
]
美國은 次世代 戰車 프로그램인
NGCV
(Next-Generation Combat Vehicle)을 推進하고 있는데, 이 프로그램은 目標 戰車 크기에 따라 大型, 中形, 小型으로 區分해서 進行 中이다. 이 中 重刑에 該當하는
RCV-M
(Ripsaw Robotics Package)가 많은 關心을 받고 있다. RCV-M은 저나 搭載龍仁 無人 地上 로봇(UGV)와 戰車 後尾에는 飛行하는
쿼드콥터드론
"스카이라이더"로 構成되어 地上 MUM-T 體系의 運營槪念을 잘 보여준다.
 SCORPION
SCORPION
? SCORPION
[
編輯
]
프랑스에서는 스콜피온(Scorpion)이라는 陸軍 現代化 事業 프로그램을 進行하고 있다. 監視偵察 시스템 및 各種 센서로부터 蒐集한 데이터를 無人 航空機, 地上 車輛 및 個人 兵士까지 共有하는 戰場 네트워크를 構成하여 狀況認識 및 打擊 能力을 向上을 目標로 하고 있다.
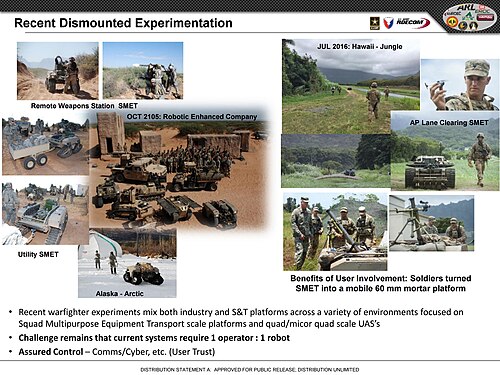
 SMET
SMET
? SMET
[
編輯
]
SMET(Squad Multipurpose Equipment Transport)은 美 陸軍에 導入될 첫 番째 地上 MUM-T 시스템으로써, 分隊를 따라다니면서 軍裝과 彈藥 等의 物資를 運搬하는 시스템이다. 美 陸軍은 2017年부터 SMET 導入을 위해 10가지 無人 시스템을 評價했고, 12月에 제너럴 다이나믹스 랜드 시스템즈(
General Dynamics Land Systems
), 폴라리스(
Polaris
)와 ARA(
Applied Research Associates
) Inc팀, 하우 앤 하우(
Howe and Howe
) 그리고 HDT의 4個社 提案을 2次 事業者로 選定하였다. 美 陸軍은 2018 會計年度 2分期에 2個 步兵旅團戰鬪팀(
IBCT
)에 4個 業體의 SMET 提案을 보내 1年間 評價할 豫定이다. 最終 製品 選定은 2019 會計年度 2分期에 이루어질 것으로 보인다.
= 2. 航空 MUM-T =
[
編輯
]
運用槪念 및 特徵
[
編輯
]
有?無人 戰鬪機 複合戰鬪體系의 主要 必要性은 有?無人機 間의 協業을 통해 戰鬪 效率 提高 및 操縱士 生存性 向上에 있다. 無人機는 敵 地域에 事前에 進入하여 探索, 偵察을 통해 威脅情報를 獲得하여 有人機와 地上의 作戰統制所로 傳達하는 役割을 함으로써 戰場 狀況에 對한 正確한 認識 및 對應을 可能하게 한다. 또한, 戰鬪 任務 또는 自爆任務를 遂行함으로써 敵 威脅으로부터 有人機 操縱士의 生存性을 向上시킬 수 있다.
[3]
 美 陸軍 航空隊의 MUM-T 시스템 構成도
美 陸軍 航空隊의 MUM-T 시스템 構成도
技術動向
[
編輯
]
無人 自律化 技術의 發展으로 無人機의 活用이 監視·偵察의 目的에서 直接的인 戰鬪行爲를 遂行하는 戰鬪用 無人岐路發展해왔으며 全 世界的으로도 4-5世代 戰鬪機를 基盤으爐韓愈·無人戰鬪機 複合體系의 開發이 進行되는 狀況이다.
海外 事例
[
編輯
]
 AH-64 아파치
AH-64 아파치
? AH-64 아파치
[
編輯
]
美 陸軍이 優先的으로 推進하고 있는 MUM-T의 誘引 시스템은
AH-64 아파치
攻擊헬기다. 美 陸軍은 AH-64D와 AH-64E 攻擊헬기에 適用될 MUM-T 開發을 위해 美 陸軍 아파치 프로젝트 事務局(Apache Project Office), 航空 프로그램 實行 事務局(Program Executive Office Aviation),
록히드 마틴
과
노드롭 그루만
의 조인트 벤처人 롱保佑 株式會社(Longbow Limited), 그리고 L3 커뮤니케이션과
보잉
이 함께 만든
SES
와 協力하고 있다.
AH-64D 攻擊헬기는 統合된 LOI 2 機能을 가진 多重帶域의 相互運營이 可能한 데이터 링크를 통해 비 戰術 共通 데이터링크
TCDL
(Tactical Common Data Link) 밴드 帶域으로 外部의 다양한 플랫폼들에서 映像을 受信할 수 있다. 美 陸軍은 AH-64D에 統合된 LOI 레벨 2 MUM-T를 MUMT-2로 부르고 있다.
MUMT-2의 데이터 링크는 無人機 시스템(UAS) 또는 아파치의 M-TADS 標的 獲得 시스템의 비디오 映像 또는 메타데이터를 다른 아파치 攻擊헬기에 再電送할 수 있다. 또한 遠隔 映像 터미널을 갖춘 地上軍에게도 電送할 수 있다. 現在 美 陸軍 航空隊의 主力 攻擊헬기인 AH-64E 아파치 가디언 攻擊헬기에 統合된
UAS
戰術 共通 데이터링크 어셈블리(UTAUAS Tactical Common Data Link Assembly)는 到達距離 50km가 넘으며, LOI 레벨이 3과 4 水準에 이른다. AH-64E 攻擊헬기에 裝着된
UTA
는
TCDL
를 裝着한 UAS와 互換된다.
이 두 가지 MUM-T는 AH-64 攻擊헬기 操縱士에게 狀況 認識 向上과 네트워크 中心 相互 運用性을 提供하면서, 探知에서 發射까지 이르는 센서 투 슈터Sensor-To-Shooter 時間을 크게 短縮하고 있다. 이를 통해 敵 火力에 對한 露出을 줄임으로써 아파치 攻擊헬기와 地上軍의 生存性을 向上시킨다.
또한 主要 決定 포인트를 빨리 識別할 수 있다. 아파치 攻擊헬기에 MUM-T 機能을 追加하면서 元來 任務인 攻擊에 偵察이 追加되었다. 長距離 데이터링크를 통해 戰術, 作戰, 그리고 戰略 司令部에 敵詩的으로 任務 命令과 情報를 傳達하는 能力을 키울 것이다.
2013年 캘리포니아州 포트 어윈Fort Irwin의 國家 試驗센터에서 實施된 AH-64E 攻擊헬기의 MUM-T 運用 試驗에서
MQ-1C 그레이 이글
無人機는 100km 넘게 떨어진 攻擊헬기에 映像을 餞送했다. 그 結果, 아파치 操縱士는 그레이 이글이 보내온 스트리밍 映像을 使用하여 自身의 자리를 떠나지 않고도 砲兵의 協助를 받아 識別된 標的을 破壞할 수 있었다.
? Black Hawk
[
編輯
]
 Black Hawk
Black Hawk
美 陸軍의
OPBH
(Optionally Piloted BLACK HAWK)는 于先
UH-60A 블랙호크 헬리콥터
의 無人 버전을 開發하여 重要한 普及 任務를 遂行할 수 있도록 만드는 MURAL(Manned/Unmanned Resupply Aerial Lifter) 프로젝트로 進行되고 있다. MURAL 프로젝트와 OPBH 프로젝트 모두 시콜스키가
OPV
開發을 위해 製作한 自律 機能 搭載 소프트웨어와 하드웨어 플랫폼인 Matrix를 使用한다.
AH-64 攻擊헬기와 함께하는 MUM-T는 殺傷力 增大에 焦點을 맞추고 있지만, MURAL/OPBH 프로젝트는 兵士의 危險 負擔 및 認知 部下를 줄이는 데 焦點을 맞추고 있다. 美 陸軍은 2030年代 中盤부터 導入될 未來 回轉翼機 事業인
FVL
(Future Vertical Lift) 事業도 MUM-T를 適用시킬 豫定이다.
유럽에서도 航空分野 MUM-T 開發 움직임이 있다. 에어버스 헬리콥터와 쉬벨(
Schiebel
)은
H145
헬기와 캠콥터
Camcopter S-100
無人 헬기를 使用하여 유럽 業體로는 처음으로 誘引 헬기에서 無人 헬기의 離着陸을 包含한 모든 制御를 遂行하는 LOI 레벨 5를 試演했다.
= 3. 海上 MUM-T =
[
編輯
]
運用槪念 및 特徵
[
編輯
]
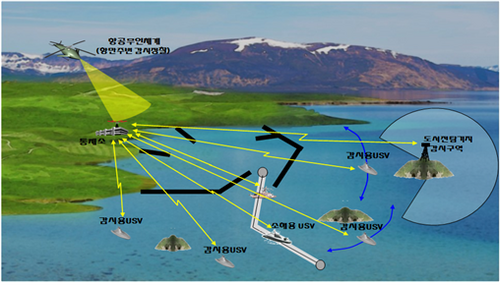
1.
大艦戰 隨行 간 有·無人 戰鬪體系 協業
[
編輯
]
海上無人戰鬪體系(
USV
) 및 航空無人戰鬪體系(
UAS
)를 利用할 境遇 謀陷의 監視·偵察 範圍를 넓힐 수 있다. 特히 USV를 利用할 境遇 韓半島 近海에 發達된 多數 圖書로 因한 監視 死角地域 解消가 可能하며, 敵 潛水艦 威脅과 關聯해서도 謀陷과 떨어진 外郭 水中에서부터 敵 水中勢力의 接近을 早期에 警告함으로서 謀陷의 生存性을 向上시킬 수 있다. 또한 海上無人戰鬪體系(USV)에는 武裝을 裝着하여 毛扇 監視 死角地域에서 活動하는 敵 中·小型 艦艇에 對한 制限된 攻擊도 可能할 것이다.
[3]
 無人戰鬪體系를 利用한 大艦戰 槪念도
無人戰鬪體系를 利用한 大艦戰 槪念도
2.對潛戰 隨行 간 有·無人 戰鬪體系 協業
[
編輯
]
먼저 敵 潛水艦의 豫想航路에 多數의 水中無人戰鬪體系(
UUV
)를 運用하여 水中에서 敵 潛水艦을 探知하는 것이다. 水中에서 運用이 可能한 無人戰鬪體系(UUV)는 誘引 潛水艦보다 小型, 低價로 製作이 可能하기 때문에 多數 UUV를 運用하는데 큰 問題가 없을 것이며, 無人戰鬪體系는 에너지가 可能한 範圍에서 持續的으로 長時間 運用이 可能하다는 長點이 있다. 首相에서는 多數의 소나를 裝着한 海上無人戰鬪體系(USV)를 運用하여 謀陷에서 運用하는 制限된 範圍의 水中 監視能力의 制限事項을 克服하고, 水中 監視能力을 匡正면으로 擴張시킬 수 있다.
[3]
 無人戰鬪體系를 利用한 對潛戰 槪念도
無人戰鬪體系를 利用한 對潛戰 槪念도
3.港灣防護 作戰 간 有·無人 戰鬪體系 協業
[
編輯
]
먼저 敵이 航路上에 設置한 機雷로부터 我軍의 艦艇을 保護하기 위해
掃海
龍 USV를 利用하여 週期的으로 航路上의 機雷를 探知하고, 除去하는 作戰을 遂行한다. 이때 無人戰鬪體系를 利用하면, 制限된 數字의 誘引 掃海艇을 運用할 境遇에 비해 持續的으로 長時間 作戰이 可能하며, 危險任務 遂行 間 發生 可能한 人命 損失을 줄일 수 있다. 또한 監視偵察用 USV는 港灣 外郭에 配置하여 港灣 周邊의 의아선박을 識別하고, 首相 및 水中 監視活動을 支援하며,
R/D 陰影區域
에 對한 巡察 및 監視能力을 向上시킬 수 있다. 平時에는 主要 港灣 周邊에서 不法으로 操業하는 船舶을 統制하는 境遇에도 活用이 可能하다. 以外에도 地上으로 港灣 施設에 接近하는 敵 浸透勢力에 對해서는 航空無人體系를 利用하여 港灣 周邊을 持續的으로 空中에서 監視·偵察하면서 港灣防護를 支援하는 地上軍部隊와 協助하여 이를 早期에 擊滅이 可能하다.
[3]
 無人戰鬪體系를 利用한 港灣 防護作戰 槪念도
無人戰鬪體系를 利用한 港灣 防護作戰 槪念도
海外 事例
[
編輯
]
 MQ-8C Fire Scout
MQ-8C Fire Scout
? MG-8C Fire Scout
[
編輯
]
美國은 ‘18. 8月 末 美 海軍 高等技術練習(ANTX : Us Navy’s Advanced Naval Technology Exercise) 海軍 機雷戰에서
MQ-8C Fire Scout
無人헬기와 小型 無人數想定 / 無人潛水艇 間의 協業에 對한 試驗을 통해 人間과 機械가 協業 時 任務遂行 能率이 向上되고, 海洋에서 UAV가 危險한 機雷 掃海 任務에 投入될 때 一定 役割을 遂行할 수 있어 作戰 人力 減少에도 效果的일 것이라는 것을 確認하였다. 또한 MQ-8C Fire Scout 無人헬기를 利用한 音響附表(
Sonobuoy
) 및 超小型 合成開口 소나(
μSAS
) 運用 試演을 實施했으며, 이를 通해 確認된 無人機의 自動化된 對潛戰 任務 遂行은 美 海軍 作戰水準을 最高로 持續 維持하는데 寄與할 것으로 判斷된다.
 Inspector MK-2 USV
Inspector MK-2 USV
? Inspector MK-2 USV
[
編輯
]
러시아 海軍은 新型
알렉산드리트(Alexandrit)級 掃海함
에 海洋無人戰鬪體系(Inspector MK 2 USV)를 導入하여 無人 臺機雷戰(
MCM
: Mine CounterMeasures) 能力을 向上시키려고 하고 있다. 또한 新型 掃海함은 Alister 9型 無人自律 潛水艇 2臺와 K-Star I型 및 C型 機雷除去處理用 遠隔無人潛水艇(
ROV
) 2臺를 搭載하고 있다.
? 中國 AUV
[
編輯
]
中國은 美 海軍의 超大型 無人潛水艇(
XLUUV
) 開發 事業에 對應하기 위하여 大型 自律無人潛水艇(
AUV
) 開發을 위한 事業을 始作했다고
사우스차이나모닝포스트
에서 報道되었는데, 開發 中인 AUV는 人工知能을 活用할 것으로 豫想되며, 監視 및 機雷附設 任務를 遂行하고, 魚雷 또는 미사일을 搭載 豫定인 것으로 알려지고 있다.
? Wattoz
[
編輯
]
터키에서는 모든 種類의 陷穽을 폭발시킬 수 있는 ‘移動式 遠隔操縱機雷’인 水中 드론을 開發하였다. ‘와토즈(Wattoz)’라고 불리는 이 水中 드론은 가오리를 닮은 形態이며, 水中에서 順航하다 電磁石을 利用하여 船體 아래 部分에 달라붙은 後 遠隔 基地局의 操縱에 依해 裝着된 爆藥을 폭발시켜 敵 艦艇을 破壞한다.
 UXV 無人戰鬪艦 槪念도
UXV 無人戰鬪艦 槪念도
? UXV
[
編輯
]
英國은 傳統的인 海洋 强國답게 다양한 目的의 海洋無人戰鬪體系를 硏究하고 있지만, 特히,
'BVT'
社는 大量의 小型 無人體系를 展開해 長期間 運用하고, 回收하는 謀陷 槪念의 無人戰鬪艦(
UXV
) 設計를 公開했는데, UXV는 未來 無人地上·海上·航空體系가 任務遂行 以前과 途中 그리고 完了 後에 使用하는 永久基地 및 統制센터로서의 役割을 遂行할 것으로 豫想되며, UXV에서는 無人潛水艇(UUV)를 進水할 수도 있으며, 多數의 兵力 및 裝備도 乘合 및 搭載 可能할 것으로 豫想된다.
活用 分野
[
編輯
]
國防 分野에서 MUM-T(Manned-Unmanned Teaming)의 活用은 매우 다양하며, 이를 통해 여러 戰略的 利點을 얻을 수 있다.
[2]
1.偵察 및 監視
[
編輯
]
無人 航空機를 使用하여 敵의 位置, 움직임, 基盤 施設을 監視하고 이 情報를 誘引 航空機와 共有한다. 이를 통해 實時間으로 戰場 狀況을 把握하고, 誘引 航空機는 더 安全한 거리에서 作戰을 指揮할 수 있다.
2.空中 支援 및 打擊 任務
[
編輯
]
MUM-T를 통해 無人 航空機가 精密 打擊 任務를 遂行하면서 誘引 航空機는 上空에서 指揮 및 支援 役割을 한다. 이는 敵에게 露出되는 危險을 줄이고, 보다 精密하고 效果的인 打擊을 可能하게 한다.
3.通信 中繼 및 제이터 共有
[
編輯
]
無人 航空機를 使用하여 敵의 電子機器를 攪亂하거나 사이버 攻擊을 遂行하면서, 誘引 航空機는 이러한 活動을 支援하고 調整한다.
4.電子戰 및 사이버戰
[
編輯
]
無人 航空機를 使用하여 敵의 電子機器를 攪亂하거나 사이버 攻擊을 遂行하면서, 誘引 航空機는 이러한 活動을 支援하고 調整한다.
5.危險한 環境 探査 및 整理
[
編輯
]
化學的, 生物學的, 放射能 危險이 있는 地域에서 無人 航空機를 活用하여 探査하고, 必要한 境遇 整理 作業을 遂行한다. 誘引 航空機는 安全한 거리에서 이러한 任務를 管理한다.
6.後方 支援 및 物流
[
編輯
]
無人 航空機를 活用하여 戰線에 必要한 物資나 裝備를 迅速하게 傳達하고, 誘引 航空機는 이러한 物流 支援任務를 調整한다. MUM-T는 旣存의 軍事 作戰에 비해 더 높은 柔軟性, 效率性 및 安全性을 提供한다. 이러한 技術의 發展은 向後 國防 戰略에 重大한 變化를 가져올 것으로 豫想된다.
國內 事例
[
編輯
]
 KF-21 보라매
KF-21 보라매
KF-21 보라매+스텔스 無人戰鬪機 가오리-X
[
編輯
]
KF-21 보라매의 開發 計劃을 보면 'Block III' 에서 無人機 運用을 念頭에 두고 있다. 이를 爲해서
KUS-X
計劃이 進行되고 있으며, 이 두가지가 모두 開發이 完了되면 팀으로 運用될 것으로 豫想된다.
人工知能을 活用한 無人戰鬪機는 스스로 敵 防空望을 뚫고 들어가 情報를 蒐集하거나 外郭에서 敵 레이더 基地를 打擊하고 空中前까지도 遂行할 수 있는 尖端 武器體系이다. 아직 스스로 空中戰을 벌일 수 있는 水準까지는 開發되지 않았지만, 攻擊 目標를 入力하면 敵 防空網 程度는 充分히 無力化 시킬 수 있는 水準이다.
 KF-21과 가오리-X
KF-21과 가오리-X
國防科學硏究所
ADD
는 實物보다 작은 크기의 示範器인
가오리X
無人機를 만들어 2015年 첫 飛行에 成功했고, 2017年부터 2次 技術 示範機 事業을 進行, 마무리된 것으로 確認된다.
스텔스 無人機 가오리 X는 레이더 反射面積을 줄여 最適의 스텔스 機能을 갖기 위해 꼬리 날개를 없앴는데, 꼬리 날개를 없으면 安定的인 飛行이 어렵고 戰鬪機의 特性인 고기同性도 保障할 수 없다. 하지만, 이런 技術的 難題를 解決하고 노하우를 蓄積했으며 스텔스 無人戰鬪機 開發에 必要한 核心 技術을 確保한 것으로 把握된다.
國防科學硏究所는 1999年부터 스텔스 形象 設計 技術, 傳播 吸收 材料技術 開發을 始作으로 傳播 吸收 複合材構造 技術, 赤外線 吸收 材料技術, 周波數 選擇的 傳播 透過 複合材 技術 等 스텔스 關聯 核心 技術을 開發하고 있으며 軍은 2030年 初 開發 完了를 目標로 하고 있다.
KAI의 LAH+無人機
[
編輯
]
 LAH 攻擊헬기
LAH 攻擊헬기
韓國 陸軍과
한국항공우주산업
(KAI)은
LAH
次期 偵察 및 警武裝헬기와 群團級 無人偵察機人 UAV2와 自爆型 無人機를 聯動하여 火力 協助支援選 너머의 敵 機動部隊와 이들의 火氣와 集結地 等에 對해 偵察하는 것부터 攻擊하는 것까지를 目標로 하여 3段階에 걸쳐서 LAH와 AH-64E에 MUM-T 인터페이스를 統合하였다
旣存에 武裝偵察헬기로도 쓰이던
500MD
헬기를 代替하기 위해 韓國軍과 防産業體들은 LAH헬기를 開發하여 配置를 하고자 하는 가운데, 過去와 같은 方式만으로는 到底히 航空機의 生存性을 保障할 수 없음을 認知하고 네트워크戰의 能力을 强化하고 있는 努力의 一員으로 MUM-T 開發事業을 進行中이다.
任務
[
編輯
]
LAH+無人機 시스템의 任務
| 救助 任務
|
遭難을 當하거나 敵地에서 負傷當한 我軍이 孤立된 狀況이 發生하면, 後方에서 待機 中인 LHA / 수리온 MUM-T가 小型 드론을 發射해 負傷兵을 追跡 後 LAH에 搭乘한 無人機 統制使에게 情報를 傳達하면 義務後送 수리온이 負傷兵을 救助하는 方式이다.
|
| 精密 打擊
|
無人機 統制使의 1次 識別을 거친 情報들은 地上統制 센터에 傳達되어 打擊 與否가 決定되고 爆擊機, 攻擊헬기, 機甲旅團 等 後方에서 待機 中인 我軍의 直接 打擊 部隊에 實時間으로 標的의 位置를 傳達해 줌으로써 地上 部隊의 敵陣 浸透 없이 敵軍을 遠距離 精密 打擊할 수 있다. 멈티는 正確한 座標에 精密 打擊을 할 수 있어 我軍의 攻擊力을 높이고 操縱士의 生存性을 높이는 效果도 있다.
|
| 自爆
|
無人機를 直接 操縱하는 無人機 統制使의 制御에 依해 無人機에 內藏되어 있는 彈頭를 利用하여 自爆을 통한 直接 打擊을 遂行할 수도 있다.
|
| 群集 드론
|
有無人 複合 體系를 통해 폭넓은 戰術의 多樣化를 꽤 할 수 있다. 廣範圍하게 펼쳐진 未識別 區域이나 探索 人力 投入이 쉽지 않은 地域에서 統制使는 統制 裝置의 여러 機能을 利用하여 多數의 小型 드론을 作戰 半徑에 山개 또는 群集 飛行하도록 하여 搜索 任務를 遂行할 수 있다.
|
 小型自爆型 UAV
小型自爆型 UAV
? LAH
[
編輯
]
小型 無人機의 運用 플랫폼으로
JTDLS
와 搭載데이터링크裝備와 徘徊型 自爆型 드론 運用統制 體系가 裝着된다.
? 小型作幅兄 UAV
[
編輯
]
陸軍에 따르면
Green Dragon
을 닮은 形象을 하였다고 하나, KAI의 映像에서는
미니下皮
를 닮은 無人機가 公開되었다. 캐니스터에서 發射되면 小型로켓모터를 稼動하여 航空機에서 離脫함과 同時에, 主翼을 展開하고 以後 小型 프로팰러를 稼動시켜 飛行한다.
? UAV2
[
編輯
]
 UAV2
UAV2
KAI에서 開發 中인 群團級 無人機이다. 高解像度
MWIR
映像을 生成하고,
X-Band
의
SAR
레이더를 利用한 고새商道 偵察 映像을 獲得한다. 該當映像은 LAH와 센서同調가 되며, 地上 C2노드와도 聯動된다.
運用 槪念
| 1段階
|
UAV2는 衛星 偵察 結果를 바탕으로 地上의 C2노드의 指揮下에, 敵 偵察과 射擊諸元을 確保한다. 該當 情報를 바탕으로 LAH나 UAV2는 C2노드의 命令에 따라 攻擊을 遂行한다.
|
| 2段階
|
LAH MUM-T는 搭載된 4個의 小型 UAV를 使用하여 直接 必要에 따라 偵察과, 攻擊作戰을 遂行하며,
BDA
算出, 敵 防空網 反應誘導, 敵 施設物 自爆 攻擊 等을 遂行할 수 있는 水準이다.
|
| 3段階
|
高速 垂直離着陸複合無人機가 統合되고, 空對地 武器 誘導 任務도 使用할 것이다.
|
留意點
[
編輯
]
1.技術的 互換性 및 統合
[
編輯
]
- 誘引 및 無人 시스템 間의 通信과 데이터 共有 技術이 圓滑히 作動해야 한다. 技術的 互換性이 不足하면 作戰 效率性이 오히려 低下될 수 있다.
- 시스템 間의 統合을 위해 標準化된 프로토콜과 인터페이스가 必要하다.
2.保安 및 사이버 威脅 對應
[
編輯
]
- MUM-T 시스템은 사이버 攻擊에 脆弱할 수 있으므로, 强力한 사이버 保安 措置를 取하는 것이 重要하다.
3.操縱士 및 運營者 訓鍊
[
編輯
]
- 誘引 및 無人 시스템을 運營하는 人力은 該當 시스템의 複雜性과 特性을 完全히 理解하고 熟鍊되어야 한다.
- 定期的인 訓鍊과 시뮬레이션을 통한 運營 能力 强化가 必要하다.
4.倫理的 및 法的 考慮事項
[
編輯
]
- 無人 시스템의 使用은 倫理的 問題를 일으킬 수 있으므로, 國際法과 戰爭法을 遵守해야 한다.
- 無人 시스템에 依한 被害나 誤謬에 對한 責任 素材를 明確히 해야 한다.
5.環境 및 戰場 條件 適應性
[
編輯
]
- 다양한 戰場 環境에서 MUM-T 시스템이 效果的으로 作動할 수 있도록 設計되어야 한다.
- 地形, 氣象 條件, 電子戰 環境 等 다양한 要因을 考慮해야 한다.
6.持續 可能性 및 維持 補修
[
編輯
]
- 시스템의 持續 可能性과 長期間 運營을 위한 維持 補修 計劃이 必要하다.
- 豫備 部品, 修理, 업그레이드 等에 對한 計劃을 歲워햐 한다.
같이 보기
[
編輯
]
參考文獻
[
編輯
]
- "4次 産業革命과 未來 武器體系", 최치원, 2022, 敎育文化
- "새로운 戰爭 : 人工知能과 로봇은 戰爭을 어떻게 바꿀 것인가?", 폴 샤레, 2021, 로크미디어
- "戰爭映畫와 未來戰爭 : 未來戰爭, 어떻게 다가올 것인가?", 문장권, 2021, 양서각
- "未來戰爭 : 尖端武器와 未來의 戰場環境", 이진호, 2011, 北코리아
- 최현호.(2018).軍事用 無人 로봇 트렌드(2) 誘引-無人 協力(MUM-T).國防과 技術,(474),22-33.
- 곽태진, 김구환, 장필성.(2022).有 · 無人 複合戰鬪體系(MUM-T) 戰術的 運用方案.國防로봇學會 論文集,1(1),9-14.
- 고기性, 고진환, 김원기, 장영현, 金光守.(2022).海上作戰基盤 有·無人 複合體系(MUM-T) 運用方案 및 감項引證 硏究.Journal of the KNST,5(2),107-114.
- 김병운.(2023).自律化 MUM-T 國防産業 戰略.航空宇宙시스템工學會誌,17(2),56-61.
- 編輯部.(2021).KAI, 有無人 複合 未來形 武器體系 開發 着手 : 방사廳과 ‘헬기-無人機 聯動體系 事業’ 契約…事業費 40億 원 規模.國防과 技術,(513),22-23.
- 임상민.(2021).戰鬪機 有無人 複合體系 開發動向 및 運用槪念에 關한 硏究.韓國航空宇宙學會 學術發表會 초록집,(),952-953.
- 박선준, 오경원.(2023).有無人 複合體系에서 人間의 役割에 對한 硏究.Journal of the KNST,6(1),34-38.
各州
[
編輯
]
- ↑
폴 샤레 (2021). 《"새로운 戰爭 : 人工知能과 로봇은 戰爭을 어떻게 바꿀 것인가?"》. 로크미디어.
- ↑
가
나
다
라
마
바
최치원 (2022). 《4次 産業革命과 未來 武器體系》. 敎育文化.
- ↑
가
나
다
라
마
바
최현호 (2018). “軍事用 無人 로봇 트렌드(2) 誘引-無人 協力(MUM-T)”. 《軍事用 無人 로봇 트렌드(2) 誘引-無人 協力(MUM-T)》 (國防과 技術).
外部 링크
[
編輯
]