Here are
262 public repositories
matching this topic...
ROS2 wrap package for ORB_SLAM3 library and ORB_SLAM3 odometry publication
Robotics with GPU computing
[IEEE ICRA'23] A new lightweight LiDAR-inertial odometry algorithm with a novel coarse-to-fine approach in constructing continuous-time trajectories for precise motion correction.
Open3D: A Modern Library for 3D Data Processing
The BunyipsLib FIRST Tech Challenge Library
-
Updated
May 28, 2024
-
Java
Tightly coupled lidar-visual-inertial slam using the fuse framework
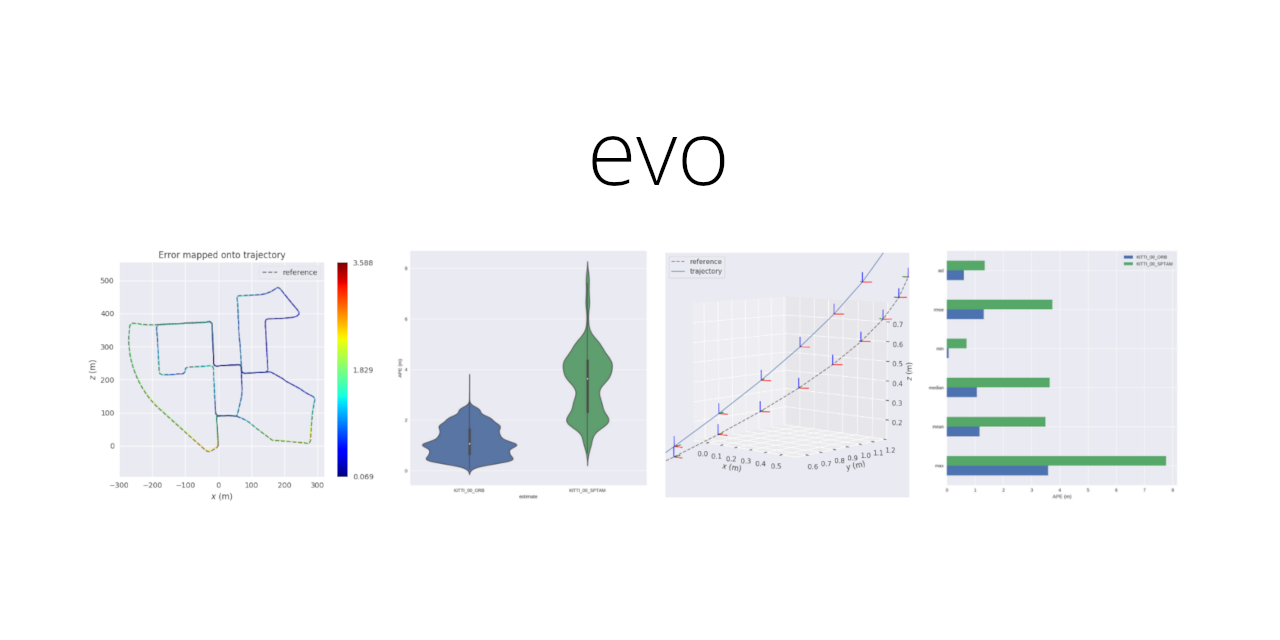
Python package for the evaluation of odometry and SLAM
-
Updated
May 26, 2024
-
Python

An easy to use and feature-rich PROS template for the Vex V5
Soccer playing robot representing Canada from University of Toronto
[ROS package] Lidar odometry from panoramic 2D range scans. Method: scan-matching without using correspondences, based on properties of the Discrete Fourier Transform
robot_localization , GPS , Mapviz and Nav2 gps ( ros2 humble)
-
Updated
May 19, 2024
-
Python
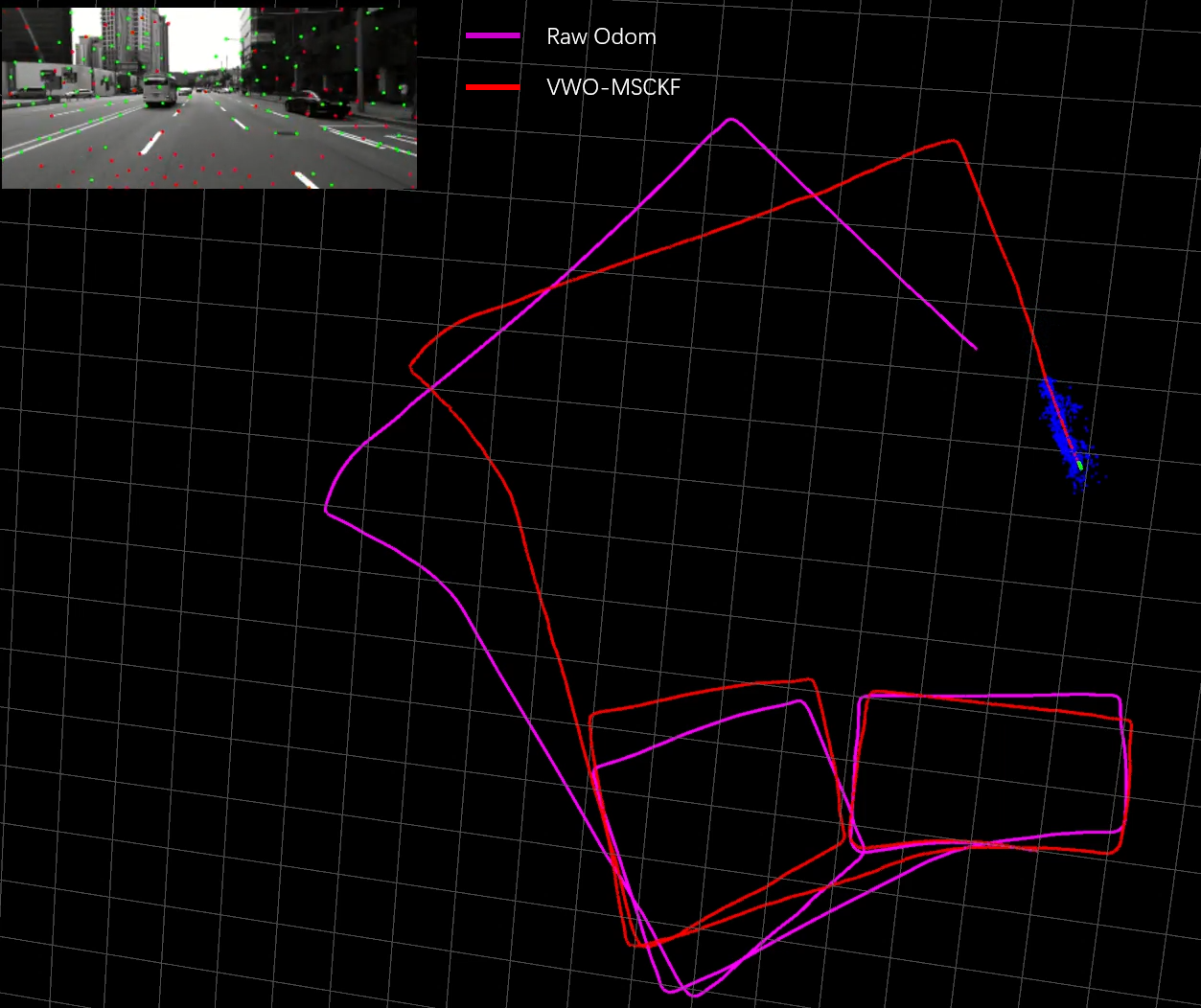
A bunch of state estimation algorithms
ORORA: Outlier-robust radar odometry, which is accepted in ICRA'23
visual (inertia) odometry of a drone with a monocular camera
-
Updated
May 11, 2024
-
Python
Acquire robust odometry from your noisy panoramic 2D LIDAR sensor
An Illumination-Robust Point-Line Visual Odometry (IROS 2023)
Adds extra repositories for advance FTC code including Photon, FTC lib, Homeostasis, Roadrunner, much more. Also included will be other software including FTC dashboard and meep meep. Included will be programming exaples for important topics.
loader for the generic 4D radar dataset
-
Updated
May 23, 2024
-
MATLAB
this code perform 3d visualization for odometry data
-
Updated
May 8, 2024
-
Jupyter Notebook
MOCAP to PX4 position publisher in ROS2.
-
Updated
May 8, 2024
-
Python
Improve this page
Add a description, image, and links to the
odometry
topic page so that developers can more easily learn about it.
Curate this topic
Add this topic to your repo
To associate your repository with the
odometry
topic, visit your repo's landing page and select "manage topics."
Learn more
You can’t perform that action at this time.
