Here are
1,444 public repositories
matching this topic...
Open source software for autonomous drones.

MIT Cheetah I Implementation
ROS packages for Turtlebot3
-
Updated
Feb 28, 2024
-
Python
中?大?MOOC《机器人操作系?入?》代?示例 ROS tutorial
-
Updated
Apr 25, 2019
-
CMake
RotorS is a UAV gazebo simulator

UAV Simulation Platform based on PX4, ROS and Gazebo
-
Updated
Mar 16, 2019
-
Python
-
Updated
Jan 22, 2024
-
HTML
Gazebo/ROS packages for underwater robotics simulation
-
Updated
Aug 8, 2023
-
Python
An add-on for Blender allowing to create URDF, SDF and SMURF robot models in a WYSIWYG environment.
-
Updated
May 16, 2024
-
Python

Open source robotics simulator. The latest version of Gazebo.
This repository contains exercise files of the book "Mastering ROS for Robotics Programming"
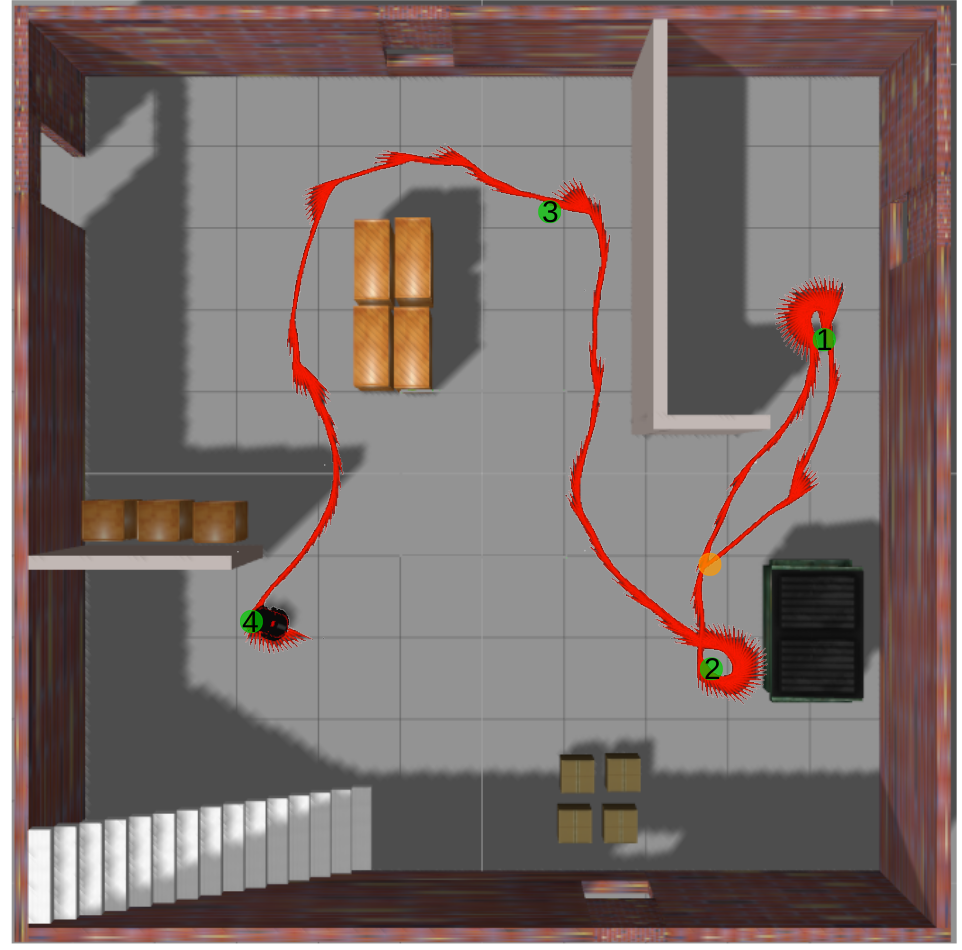
Deep Reinforcement Learning for mobile robot navigation in ROS Gazebo simulator. Using Twin Delayed Deep Deterministic Policy Gradient (TD3) neural network, a robot learns to navigate to a random goal point in a simulated environment while avoiding obstacles.
-
Updated
Aug 4, 2023
-
Python
Autonomous mobile robots (2WD, 4WD, Mecanum Drive)
-
Updated
May 13, 2024
-
Python
Universal Robot (UR5) Pick and Place Simulation in ROS-Gazebo with a USB Cam and Vacuum Grippers
-
Updated
Nov 19, 2021
-
Python
gym-gazebo2 is a toolkit for developing and comparing reinforcement learning algorithms using ROS 2 and Gazebo
-
Updated
Jul 4, 2019
-
Python
Aggressive trajectory tracking using mavros for PX4 enabled vehicles
A universal flight control tuning framework
-
Updated
Oct 7, 2021
-
Python
The entry point to the MRS UAV system.
-
Updated
May 8, 2024
-
Shell
Improve this page
Add a description, image, and links to the
gazebo
topic page so that developers can more easily learn about it.
Curate this topic
Add this topic to your repo
To associate your repository with the
gazebo
topic, visit your repo's landing page and select "manage topics."
Learn more
You can’t perform that action at this time.
