Here are
261 public repositories
matching this topic...
Open3D: A Modern Library for 3D Data Processing
Python package for the evaluation of odometry and SLAM
-
Updated
May 10, 2024
-
Python
LeGO-LOAM: Lightweight and Ground-Optimized Lidar Odometry and Mapping on Variable Terrain
loam code noted in Chinese(loam中文注解版)
Robotics with GPU computing
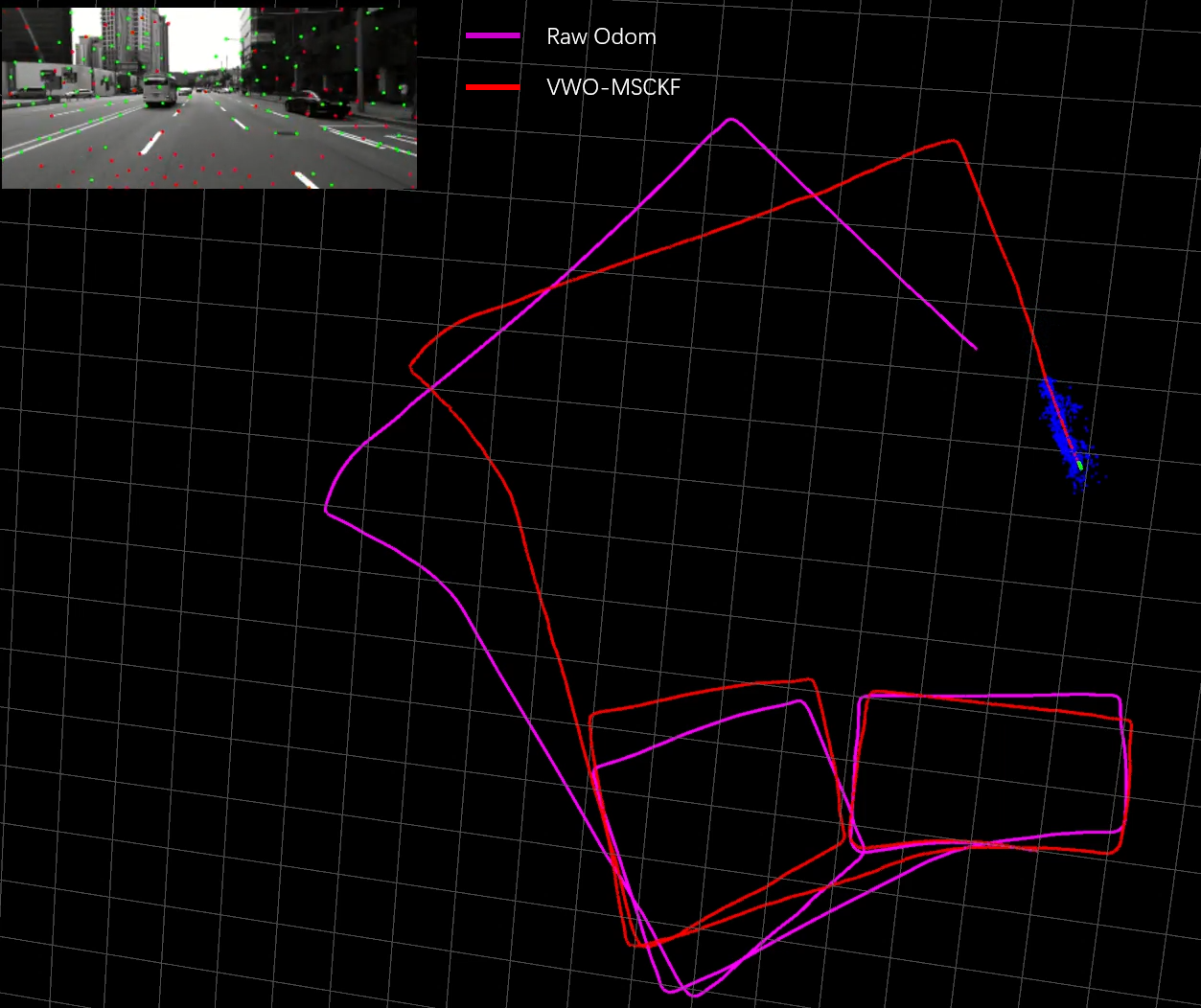
X Inertial-aided Visual Odometry
[IEEE RA-L & ICRA'22] A lightweight and computationally-efficient frontend LiDAR odometry solution with consistent and accurate localization.
CT-ICP: Continuous-Time LiDAR Odometry
Convert KITTI dataset to ROS bag file the easy way!
-
Updated
Jan 4, 2023
-
Python
[IEEE ICRA'23] A new lightweight LiDAR-inertial odometry algorithm with a novel coarse-to-fine approach in constructing continuous-time trajectories for precise motion correction.
An Illumination-Robust Point-Line Visual Odometry (IROS 2023)
Full-python LiDAR SLAM using ICP and Scan Context
-
Updated
Nov 17, 2023
-
Python
Robust LiDAR SLAM with a versatile plug-and-play loop closing and pose-graph optimization.
Poisson Surface Reconstruction for LiDAR Odometry and Mapping
-
Updated
Apr 4, 2022
-
Python
?? A curated list of awesome mobile robots study resources based on ROS (including SLAM, odometry and navigation, manipulation)
-
Updated
May 1, 2024
-
Python
A bunch of state estimation algorithms
This is the offical codes for the methods described in the "Feature-metric Loss for Self-supervised Learning of Depth and Egomotion".
-
Updated
Oct 20, 2021
-
Python
T-LOAM: Truncated Least Squares Lidar-only Odometry and Mapping in Real-Time
Improve this page
Add a description, image, and links to the
odometry
topic page so that developers can more easily learn about it.
Curate this topic
Add this topic to your repo
To associate your repository with the
odometry
topic, visit your repo's landing page and select "manage topics."
Learn more
You can’t perform that action at this time.
