≪К'юр?ос?т?≫
? роботизований ровер, розм?рами з автомоб?ль, який досл?джу?
Марс
та ? частиною програми
НАСА
≪
Марс?анська наукова лаборатор?я
≫ (MSL).
≪К'юр?ос?т?≫ був запущений з мису
Канаверал
26 листопада 2011 року, о 10:02 на борту косм?чного корабля ≪Марс?анська наукова лаборатор?я≫ ? приземлився на
Aeolis Palus
у
кратер? ?ейла
на Марс? 6 серпня 2012 року, о 5:17. М?сце посадки
Bradbury Landing
розташову?ться менше н?ж за 2,4 км в?д точки приземлення марсохода п?сля подорож? завдовжки 563 млн км.
Мета марсохода охоплю? досл?дження
кл?мату
та
геолог?? Марса
; чи були в вибран?й д?лянц? кратера ?ейла коли-небудь сприятлив? умови навколишнього середовища для м?кробного життя, включаючи досл?дження рол? води ? заселення планети в процес? п?дготовки для подальшого осво?ння космосу людиною.
Дизайн ≪К'юр?ос?т?≫ послужить основою для плановано? м?с?? (
Марс 2020
). У грудн? 2012 року м?с?я ≪К'юр?ос?т?≫ була продовжена на невизначений терм?н.
24 червня 2014 року ≪К'юр?ос?т?≫ завершив марс?анський р?к (687 земних д?б). В?н виявив, що Марс колись мав умови навколишнього середовища, сприятлив? для м?кробного життя.
MSL ма? чотири основн? ц?л?:
- З'ясувати, чи ?снувало коли-небудь життя на Марс?.
- Отримати докладн? в?домост? про
кл?мат
Марса.
- Отримати докладн? в?домост? про
планетолог?ю
Марса.
- Зд?йснити п?дготовку до висадки людини на Марс.
Для досягнення цих ц?лей перед MSL поставлено в?с?м основних завдань:
- Виявити та встановити природу марс?анських орган?чних вуглецевих сполук.
- Виявити речовини, необх?дн? для ?снування життя:
вуглець
,
водень
,
азот
,
кисень
,
фосфор
,
с?рку
.
- Виявити можлив? сл?ди переб?гу б?олог?чних процес?в.
- Визначити х?м?чний склад марс?ансько? поверхн?.
- Встановити процес формування марс?анських камен?в ? ?рунту.
- Оц?нити процес еволюц?? марс?ансько? атмосфери в довгостроковому пер?од?.
- Визначити поточний стан, розпод?л ? кругооб?г води та
вуглекислого газу
.
- Встановити спектр рад?оактивного випром?нювання на поверхн? Марса.
≪К'юр?ос?т?≫ склада? 23 % ваги (3893 кг) ≪Марс?ансько? науково? лаборатор??≫. Вага марсохода 899 кг, 2401 кг ? вага спускного апарата (включаючи 390 кг палива для м'яко? посадки); 539 кг ? вага
перел?тного модуля
необх?дного для польоту до Марса.
Вага основних компонент?в
Косм?чного апарата
| Основн? складов?
|
Компонент
|
Вага
|
Доповнення
|
| Перел?тний модуль
|
|
539 кг
|
з якого 70 кг паливо
|
| Спускний апарат
|
Теплозахисний екран
|
382 кг
|
|
| Капсула
|
349 кг
|
|
| ≪Небесний кран≫
|
829 кг
|
|
| Паливо
|
390 кг
|
|
| Всього
|
2400 кг
|
|
| Марсох?д
К'юр?ос?т?
|
|
899 кг
|
|
| Вся вага
|
|
3839 кг
|
|
Маса ≪К'юр?ос?т?≫ п?сля м'яко? посадки склала 899 кг, у тому числ? 80 кг наукового обладнання
[5]
.
- Розм?ри.
Марсох?д ма? довжину 3 м, висоту з встановленою щоглою 2,1 м, ширину 2,7 м
[6]
. ≪К'юр?ос?т?≫ набагато б?льше сво?х попередник?в ? марсоход?в ≪
Сп?рит
≫ ? ≪
Оппортюн?т?
≫, як? мали довжину 1,5 м ? масу 174 кг (у тому числ? 6,8 кг науково? апаратури)
[7]
[8]
[9]
.
- Пересування.
На поверхн? Марса марсох?д здатен долати перешкоди до 75 см заввишки. Максимальна оч?кувана швидк?сть на перес?чн?й м?сцевост? становить 90 м на годину у раз? автоматично? нав?гац??. Середня ж швидк?сть становитиме 30 метр?в на годину. Оч?ку?ться, що за час двор?чно? м?с?? MSL здола? не менше 19 к?лометр?в. Максимальна швидк?сть на тверд?й р?вн?й поверхн? становить 144 метра на годину
[10]
.
- Рад?о?зотопна електрична система (RPSs) ? генератором, який виробля? електроенерг?ю в?д природного розпаду ?зотопу
плутон?ю-238
. Тепло вид?ля?ться при природному розпад? цього ?зотопу ? п?зн?ше перетворю?ться на електроенерг?ю, забезпечуючи пост?йний струм протягом усього року, вдень ? вноч?; також тепло може використовуватися для п?д?гр?ву обладнання (переходячи до них по трубах). При цьому заощаджу?ться електроенерг?я, яка може бути використана для пересування марсохода ? роботи його ?нструмент?в
[11]
[12]
. ≪К'юр?ос?т?≫ отриму? електроживлення в?д енергоустановки, надано?
М?н?стерством Енергетики США
[13]
, що м?стить 4,8 кг плутон?ю-238
[13]
. Плутон?й у вигляд? д?оксиду упакований у 32 керам?чн? гранули, кожна розм?ром приблизно в 2 сантиметри
[7]
.
- Генератор ≪К'юр?ос?т?≫ ? останн?м покол?нням Р?ТЕГ, зроблений компан??ю
Boeing
, ? назива?ться ≪Багатозадачний рад?о?зотопний термоелектричний генератор≫, або MMRTG
[14]
. Цей базований на класичн?й технолог?? Р?ТЕГ ? б?льш гнучким ? компактним
[14]
, в?н розрахований на виробництво 125 Вт електрично? енерг?? (0,16
к?нсько? сили
у перерахунку на одиниц? вим?рювання потужност? автомоб?льних двигун?в) з приблизно 2 кВт теплово? (на початку м?с??)
[11]
[12]
. З часом MMRTG стане виробляти менше, н?ж 125 Вт. При м?н?мальному терм?н? служби в 14 рок?в, його вих?дна потужн?сть знизиться лише до 100 Вт
[15]
[16]
. Енергоустановка MSL генеру? 2,5 кВт·год кожен марс?анський день, що набагато б?льше, н?ж вих?д енергоустановок марсоход?в ≪Сп?рит≫ ? ≪Оппортюн?т?≫ (близько 0,6 кВт·год за марс?анський день).
- Система в?дведення тепла
(HRS). Температура област?, у як?й буде перебувати ≪К'юр?ос?т?≫, у травн? може коливатися в?д +30 до ?127 °C. Система в?дведення тепла (HRS) прокачу? р?дину через труби загальною довжиною 60 м у т?л? MSL, щоб чутлив? елементи системи перебували в оптимальн?й температур?
[17]
. ?нш? методи нагр?ву внутр?шн?х компонент?в включають у себе використання тепла, яке було вид?лено в?д прилад?в, а також зайвого тепла в?д генератора MMRTG. HRS також ма? здатн?сть охолоджувати сво? компоненти в раз? потреби
[17]
. На косм?чному апарат? встановлений
кр?огенний
теплообм?нник
, вироблений в
?зра?л?
компан??ю
Ricor Cryogenic and Vacuum Systems
. В?н да? змогу збер?гати температуру р?зних в?дс?к?в апарата на позначц? ?173 °C
[18]
.
- Комп'ютер.
На марсоход? встановлено два однаков? бортов? комп'ютери п?д назвою
Rover Compute Element
(RCE) п?д управл?нням процесора
RAD750
з частотою 200 МГц; вони м?стять рад?ац?йност?йку пам'ять. Кожен комп'ютер м?стить у соб? 256-кБ
EEPROM
, 256-МБ DRAM ? флеш-пам'ять на 2 ГБ
[19]
. Ця к?льк?сть загалом б?льше 3 МБ EEPROM
[20]
, 128 Мб DRAM ? 256 Мб флеш-пам'ят?, як? були на марсоходах ≪Сп?рит≫ ? ≪Оппортюн?т?≫
[21]
. Використову?ться багатозадачна
ОСРВ
VxWorks
.
- Комп'ютер пост?йно стежить за марсоходом: наприклад, сам може п?двищити або знизити температуру, коли це необх?дно
[19]
. В?н да? команди на фотографування, керування марсоходом, в?дправку зв?ту про техн?чний стан ?нструмент?в. Накази марсоходу передаються операторами ?з Земл?
[19]
.
- Комп'ютери використовують процесор
RAD750
, який ? наступником процесора
RAD6000
, що використовувався в
Mars Exploration Rover
[22]
[23]
. RAD750 здатний виконувати до 400 м?льйон?в операц?й н секунду, тод? як
RAD6000
здатний виконувати до 35 м?льйон?в операц?й на секунду
[24]
[25]
. З двох бортових комп'ютер?в один налаштований як резервний ? в?зьме на себе управл?ння в раз? виникнення проблем з основним комп'ютером
[19]
.
- Марсох?д обладнаний ?нерц?йним вим?рювальним пристро?м (
Inertial Measurement Unit
)
[19]
, який нада? ?нформац?ю про м?сцезнаходження марсохода, використову?ться як нав?гац?йний ?нструмент.
- Зв'язок.
≪К'юр?ос?т?≫ ма? дв? системи зв'язку. У першу входять передавач ? приймач
X-д?апазону
, за допомогою яких марсох?д зв'язу?ться безпосередньо ?з Землею, з? швидк?стю до 32 кб?т/с. Друга працю? в д?апазон?
ДМВ
(UHF) ? створена на баз? програмно-визначально? рад?осистеми
Electra
? Lite, розроблено? в JPL спец?ально для косм?чних апарат?в. ДМВ-рад?о використову?ться для зв'язку з? штучними супутниками Марса. Незважаючи на те, що у ≪К'юр?ос?т?≫ ? можлив?сть прямого зв'язку ?з Землею, велика частина даних буде ретранслюватись орб?тальними апаратами, що забезпечують б?льшу пропускну здатн?сть за рахунок б?льшого д?аметра антен ? б?льш потужних передавач?в. Швидкост? передач? даних м?ж ≪К'юр?ос?т?≫ ? кожним орб?тальним апаратом можуть бути 2 Мб?т/с (
Mars Reconnaissance Orbiter
) ? 256 кб?т/с (≪
Марс Од?сс
ей
≫), кожен супутник ма? можлив?сть тримати зв'язок ?з ≪К'юр?ос?т?≫ приблизно 8 хвилин на день
[26]
. Також у орб?тальних апарат?в пом?тно б?льше часове в?кно в якому ? можлив?сть зв'язку ?з Землею.
- П?д час посадки телеметр?я могла в?дстежуватися вс?ма трьома супутниками, що перебувають на орб?т? Марса: ≪Марс Од?ссей≫,
Mars Reconnaissance Orbiter
? ≪Марс-експрес≫
?вропейського косм?чного агентства
. Марс Од?ссей служив як ретранслятор ? передавав телеметр?ю на Землю в потоковому режим?. На Земл? сигнал приймали ?з затримкою в 13 хвилин 46 секунд, необх?дних для подолання рад?осигналом в?дстан? м?ж планетами.
- Ман?пулятор.
На ровер? встановлений трьохсуглобовий ман?пулятор довжиною 2,1 м, на якому змонтован? 5 прилад?в загальною масою близько 30 кг. Вони змонтован? на к?нц? ман?пулятора в хрестопод?бн?й веж?-турел?, здатно? повертатися на 350°. Д?аметр башти з ?нструментами становить близько 60 см. П?д час руху ман?пулятор склада?ться.
- Два прилади:
APXS
?
MAHLI
? ? контактними (
in-situ
) ?нструментами. Решта 3 прилади: ударна дрель, щ?тка ? механ?зм для забору ? прос?ювання зразк?в ?рунту ? виконують функц?? видобутку ? приготування матер?алу (зразк?в) для досл?дження. Дрель ма? 2 запасних бури. Вона здатна робити отвори в камен? д?аметром 1,6 см ? глибиною в 5 см. Добут? ман?пулятором зразки можуть, також досл?джуватися приладами
SAM
?
CheMin
, як? розташован? в передн?й частин? корпуса ровера
[27]
[28]
[29]
- Через р?зницю м?ж земною ? марс?анською (38 % земно?) грав?тац??ю масивний ман?пулятор п?дда?ться р?зного ступеня деформац??, для компенсац?? р?зниц? яко?, встановлю?ться спец?альне програмне забезпечення (ПЗ). Робота ман?пулятора з даними ПЗ в умовах Марса вимага? додаткового часу для налагодження
[30]
.
- Моб?льн?сть марсохода.
Як ? в попередн?х марсоходах,
Mars Exploration Rover
?
Mars Pathfinder
, ≪К'юр?ос?т?≫ ма? платформу з науковим обладнанням. Усе це встановлено на шести колесах, кожне з яких ма? св?й електродвигун, причому два передн?х ? два задн?х колеса беруть участь у керуванн?, що да? апарату змогу розвертатися на 360°, залишаючись при цьому на м?сц?
[31]
. Колеса ≪К'юр?ос?т?≫ значно б?льше, н?ж т?, як? використовувалися в попередн?х м?с?ях. Кожне колесо ма? певну конструкц?ю, яка допомага? марсоходу п?дтримувати тягу, якщо в?н застрягне в п?ску, також колеса марсохода будуть залишати сл?д у вигляд? регулярного в?дбитку на п?щан?й поверхн? Марса. У цьому в?дбитку за допомогою
коду Морзе
у вигляд? отвор?в записан? букви JPL (
Лаборатор?я реактивного руху
, англ.
Jet Propulsion Laboratory
)
[32]
.
- За допомогою бортових камер марсох?д розп?зна? елементи регулярного в?дбитка кол?с (в?зерунки) ? зможе визначити пройдену в?дстань.
- П?дв?ска.
Високу прох?дн?сть марсохода забезпечу? запатентована в США п?дв?ска
Rocker-bogie
.
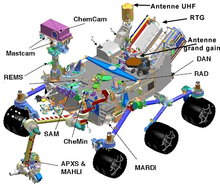 ?нструменти. Компонування.
?нструменти. Компонування.
 Дв? камери з системи
MastCam
у пор?внянн? з
Швейцарським арм?йським ножем.
Дв? камери з системи
MastCam
у пор?внянн? з
Швейцарським арм?йським ножем.
 Спектрометр (л?воруч), лазерний телескоп (праворуч) у центр?. (
ChemCam
)
Спектрометр (л?воруч), лазерний телескоп (праворуч) у центр?. (
ChemCam
)
 Верх?вка датчика (л?воруч) ? електрон?ка (праворуч)
APXS
.
Верх?вка датчика (л?воруч) ? електрон?ка (праворуч)
APXS
.
 SAM
на тестуванн?.
SAM
на тестуванн?.
 ?нструмент
RAD
.
?нструмент
RAD
.
 Камера
MAHLI
.
Камера
MAHLI
.
 Камера
MARDI
у пор?внянн? з?
швейцарським арм?йським ножем.
Камера
MARDI
у пор?внянн? з?
швейцарським арм?йським ножем.
Науков? прилади апарата дають змогу ефективно виявляти орган?чн? молекули й визначати ?х структуру, а також зондувати товстий шар ?рунту в пошуках сл?д?в води за допомогою нейтронного детектора, створеного
Роскосмосом
. За допомогою
?нфрачервоного
лазера можна буде видаляти з м?нерал?в зайв? нашарування (пил, продукти короз??) й одразу зд?йснювати лазерний х?м?чний анал?з на в?дстан? до 10 метр?в. ≪Серце≫ науково? апаратури ? прилад SAM. В?н буде визначати х?м?чний склад ?рунту й шукати в ньому орган?чн? молекули. Цей прилад ма? передавати п'яту частку вс?х даних з Марса.
Список основних прилад?в на марсоход?:
- Три спец?альн? камери було розроблено компан??ю
Malin Space Science Systems
. Вони використовують однаков? компоненти, зокрема модуль обробки зображень, св?тлочутлив? елементи (ПЗС-матриц? ? 1600 x1200 п?ксел?в) та RGB ф?льтри Бай?ра
- MastCam
: Система склада?ться з двох камер, ? м?стить багато спектральних ф?льтр?в. Можливе отримання зн?мк?в у природних кольорах розм?ром 1600x1200 п?ксел?в та в?део з розд?льною здатн?стю 720p (1280x720), апаратною компрес??ю та з частотою до 10 кадр?в на секунду. Перша камера (
Medium Angle Camera
?
MAC
), ма? фокусну в?дстань 34 мм ? 15-градусне поле зору, 1 п?ксель дор?вню? 22 см на в?дстан? 1 км. Друга камера (
Narrow Angle Camera
?
NAC
) ма? фокусну в?дстань 100 мм, 5,1 градусне поле зору, 1 п?ксель дор?вню? 7,4 см на в?дстан? 1 км. Кожна камера ма? по 8 Гб флеш-пам'ят?, яка здатна збер?гати б?льше 5500 необроблених зображень, ? п?дтримка JPEG-компрес?? й стиснення без втрати якост?. В обох камерах ? функц?я автоматичного фокусування, яка да? ?м змогу сфокусуватися на об'?ктах, в?д 2,1 м до неск?нченност?. Незважаючи на наявн?сть у виробника конф?гурац?? з трансфокатором, камери не мають зуму, оск?льки часу для тестування не залишалося. Кожна камера ма? вбудований
ф?льтр Байера
RGB ? по 8 ?Ч-ф?льтр?в. У пор?внянн? з панорамно? камерою, яка сто?ть на
≪Сп?рит≫
?
≪Опортьюн?т?≫
(MER) ? отриму? чорно-б?л? зображення розм?ром 1024 × 1024 п?ксел?в, камера MAC MastCam ма? кутовий дозв?л в 1,25 рази вище, а камера NAC MastCam ? у 3,67 раза вище.
- Mars Hand Lens Imager
(
MAHLI
): склада?ться з камери, закр?плено? на роботизован?й руц? марсохода й застосову?ться для отримання м?кроскоп?чних зображень г?рських пор?д та ?рунту. Камера отриму? зображення розм?ром 1600x1200 п?ксел?в з розд?льною здатн?стю до 14,5 мкм на п?ксель. Ма? фокусну в?дстань в?д 18,3 до 21,3 мм ? поле зору в?д 33,8 до 38,5 градус?в. Для роботи в темряв? ? вбудована св?тлод?одна п?дсв?тка (звичайна б?ла й ультраф?олетова). Ця камера здатна сфокусуватися на об'?ктах в?д 1 мм. Система може також зробити сер?ю зображень для подальшо? обробки зн?мка. ? можлив?сть зберегти необроблене фото без втрати якост? або ж зробити стиснення в JPEG формат?.
- Mars Descent Imager
(
MARDI
) передавала п?д час спуску на поверхню Марса кольорове зображення розм?ром 1600x1200 п?ксел?в з
витримкою
1,3 мс та з частотою 5 кадр?в на секунду. Камера почала зйомку на висот? 3,7 км ? зак?нчила на висот? 5 метр?в над поверхнею Марса, зйомка тривала близько 2 хвилин. М?стить 8 Гб вбудовано? пам'ят?, яка може збер?гати б?льше 4000 фотограф?й. Зн?мки з камери дозволили побачити навколишн?й рель?ф на м?сц? посадки.
- ChemCam
: це наб?р ?нструмент?в дистанц?йного досл?дження, зокрема спектрометр
Laser-Induced Breakdown Spectroscopy
(
LIBS
) та камера
Remote Micro-Imager
(
RMI
). LIBS генеру? 50?75 ?мпульс?в ?нфрачервоного лазера з довжиною хвил? 1067
нм
та загальною тривал?стю 5 наносекунд, ? фокусу?ться на зразках на в?дстан? до 7 метр?в. Прилад анал?зу? спектр св?тла, що випром?ню?ться плазмою зразка, у видимому, ультраф?олетовому й ближньому ?нфрачервоному д?апазонах (240?800 нм). RMI-камера використову? оптику LIBS ? да? змогу розглед?ти об'?кти розм?рами в?д 1 мм на в?дстан? 10 м, поле зору на таких в?дстанях становить 20 см. ChemCam було розроблено в
Лос-Аламоськ?й нац?ональн?й лаборатор??
та французьк?й лаборатор??
CESR
. Варт?сть ChemCam для НАСА становила близько 10 млн дол., зокрема, перевитрати близько 1,5 млн дол. Розд?льна здатн?сть устаткування в 5?10 раз?в вища, н?ж у встановленого на попередн? марсоходи. З семи метр?в ChemCam може визначити тип досл?джувано? породи (наприклад, вулкан?чна або осадова), структуру ?рунту й кам?ння, в?дстежити дом?нуюч? елементи, розп?знати л?д ? г?дратован? м?нерали, досл?дити сл?ди ероз?? на каменях ? в?зуально допомогти при досл?дженн? пор?д ман?пулятором. Варт?сть
ChemCam
для НАСА склала близько 10 млн дол., у тому числ? перевитрата близько 1,5 млн дол. ?нструмент був розроблений Лос-Аламоською нац?ональною лаборатор??ю сп?льно з французькою лаборатор??ю CSR. Розробка була завершена, а обладнання було готове до доставки в JPL в лютому 2008 року.
- Alpha-particle X-ray spectrometer
(
APXS
): рентген?вський спектрометр на альфа-частинках буде опром?нювати
альфа-частинками
зразки й з?ставляти спектри в
рентген?вських променях
для визначення елементного складу породи. Прилад створено
Канадським косм?чним агентством
. MacDonald Dettwiler (
MDA
) ? Аерокосм?чна канадська компан?я, яка буду? Canadarm ? RADARSAT, несуть в?дпов?дальн?сть за проектування ? буд?вництво
APXS
. Команда з розробки APXS включа? в себе член?в з Ун?верситету Гвельф?в, Ун?верситету Нью-Брансв?к, Ун?верситету Зах?дного Онтар?о, НАСА, Ун?верситет Кал?форн??, Сан-Д??го ? Корнельського ун?верситету.
- Collection and Handling for In-Situ Martian Rock Analysis (CHIMRA):
CHIMRA явля? собою к?вш 4 × 7 сантиметр?в, який зачерпу? ?рунт. У внутр?шн?х порожнинах CHIMRA в?н прос?ва?ться через сито з осередком 150 м?крон, чому допомага? робота в?бромехан?зму, зайве в?ддаля?ться, а на прос?ювання в?дправля?ться наступна порц?я. Всього проходить три етапи паркану з ковша ? прос?ювання ?рунту. У результат? залиша?ться трохи порошку необх?дно? фракц??, який ? в?дправля?ться в ?рунтоприймач, на т?л? ровера, а зайве викида?ться. У результат? з усього ковша на анал?з надходить шар ?рунту в 1 мм. П?дготовлений порошок вивчають прилади CHEMIN ? SAM.
- CheMin
: цей спектрометр досл?джу? х?м?чний ? м?нералог?чний склад за допомогою рентген?вського флуоресцентного анал?зу й рентген?всько? дифракц??. Chemin да? змогу визначити велику к?льк?сть корисних копалин на Марс?. ?нструмент було розроблено Дев?дом Блейком з Ames Research Center та
Лаборатор?? реактивного руху
(
англ.
Jet Propulsion Laboratory
) НАСА. Марсох?д буде бурити г?рськ? породи, а отриманий порошок збира?ться ?нструментом та опром?ню?ться рентген?вськими променями. Дифракц?я рентген?вських промен?в р?зна для р?зних м?нерал?в, тому картина дифракц?? да? змогу визначити структуру речовини. ?нформац?ю про св?тн?сть атом?в ? дифракц?йну картину буде зн?мати спец?ально п?дготовлена E2V CCD-224 матриця розм?ром 600 × 600 п?ксел?в. У ≪К'юр?ос?т?≫ ? 27 осередк?в для анал?зу зразк?в, п?сля вивчення одного зразка осередок може бути перевикористаний, але анал?з буде мати меншу точн?сть через забруднення попередн?м зразком. Таким чином у ровера ? всього 27 спроб для повноц?нного вивчення зразк?в. Ще 5 запаяних осередк?в збер?гають зразки з Земл?
[33]
. Вони потр?бн? щоб протестувати працездатн?сть приладу в марс?анських умовах. Для роботи приладу потр?бна температура ?60 °C, ?накше будуть заважати перешкоди в?д приладу DAN.
- Sample Analysis at Mars
(
SAM
): цей вим?рювальний комплекс ?нструмент?в ? найважчим ? найб?льшим на марсоход?, його маса 38 кг, це майже половина маси вс?х наукових прилад?в на борту.
SAM
було розроблено й з?брано в Goddard Space Flight Center. За допомогою трьох комб?нованих сенсорних систем в?н ма? в?дпов?сти на питання, чи було колись на Марс? середовище, придатне для живих орган?зм?в, ? чи ?сну? таке середовище на планет? сьогодн?.
SAM
да? змогу анал?зувати як тверд? зразки, наприклад, зразки ?рунту, так ? атмосферний газ, ? здатен виявляти та анал?зувати
орган?чн? сполуки
, легк? елементи, а також сп?вв?дношення
?зотоп?в
у атмосфер?. Попередня п?дготовка зразк?в в?дбува?ться в
Sample Manipulation System
(
SMS
), де передбачено численн? сита та 74 контейнери. Комплекс ма? також дв? електропеч? потужн?стю 40 Вт ?з максимальною температурою до 1100 °C, як? дають змогу вид?лити летк? речовини з твердих зразк?в, а також зд?йснити
п?рол?з
орган?чних сполук. Отриманий газ (чи безпосередньо проба з атмосфери) потрапля? в
Chemical Separation and Processing Laboratory
(
CMPL
). Тут ? ц?ла система для подальшо? п?дготовки до вим?рювання, що склада?ться з 50 клапан?в, 15 вентильних блок?в, велико? к?лькост?
абсорбц?йних
комб?нованих ф?льтр?в, зм?шувач?в, сепаратор?в та насос?в. П?сля тако? п?дготовчо? фази газ може бути спрямовано посл?довно в один з трьох вим?рювальних прилад?в: газовий
хроматограф
(
GS
?
Gas Chromatograph
), лазерний
спектрометр
Tunable Laser Spectrometer
(
TLS
) чи квадрупольний
мас-спектрометр
Quadrupole Mass Spectrometer
(
QMS
).
GS
використову?ться для розд?лення сум?ш? газ?в на компоненти, як? в подальшому спрямовуються на мас-спектрометр
QMS
.
TLS
да? змогу точно визначити в?дношення ?зотоп?в кисню та вуглецю у
вуглекислому газ?
(CO
2
) та
метан?
(CH
4
), ?, сво?ю чергою, да? змогу визначити походження цих газ?в (б?олог?чне або геох?м?чне)
[34]
[35]
[36]
.
- Radiation assessment detector
(
RAD
): в?н досл?джу? рад?ац?йний фон усередин? марсохода. З?бран? детектором RAD дан? на шляху до планети й на поверхн? Марса служитимуть для оц?нки р?вня рад?ац?? в майбутн?х м?с?ях. Прилад встановлений практично в самому ≪серц?≫ ровера, ? тим самим ?м?ту? астронавта, що знаходиться всередин? косм?чного корабля. RAD був включений першим з науково ?нструмент?в для MSL, ще на навколоземн?й орб?т?, ? ф?ксував рад?ац?йний фон всередин? апарата ? а пот?м ? всередин? ровера п?д час його роботи на поверхн? Марса. В?н збира? дан? про ?нтенсивн?сть опром?нення двох тип?в: високоенергетичних галактичних промен?в ? частинок, що випускаються Сонцем. RAD був розроблений у Н?меччин? П?вденно-зах?дним досл?дним ?нститутом (SwRI) позаземно? ф?зики в груп?
Christian-Albrechts-Universitat zu Kiel
за ф?нансово? п?дтримки управл?ння
Exploration Systems Mission
у штаб-квартир? НАСА та Н?меччини.
- Dynamic Albedo of Neutrons
(
DAN
): прилад використову?ться для виявлення водню, води й льоду на поверхн? Марса, склада?ться з ?мпульсного нейтронного генератора та детектора. Для MSL прилад надано Федеральним косм?чним агентством (Роскосмос). Варт?сть розробки приладу становила понад 3 млн дол. ? сп?льною розробкою
НД? автоматики ?м. Н. Л. Духова при ≪Росатом?≫
(?мпульсний нейтронний генератор),
?нституту косм?чних досл?джень РАН
(блок детектування) ?
Об'?днаного ?нституту ядерних досл?джень
(кал?брування)
[37]
[38]
. До складу приладу входять ?мпульсне
джерело нейтрон?в
?
приймач нейтронного випром?нювання
. Генератор випром?ню? в сторону марс?ансько? поверхн? коротк?, потужн? ?мпульси нейтрон?в. Тривал?сть ?мпульсу становить близько 1 мкс, потужн?сть потоку ? до 10 млн нейтрон?в з енерг??ю 14 МеВ за один ?мпульс. Частинки проникають у ?рунт Марса на глибину до 1 м, де вза?мод?ють з ядрами основних породоутворюючих елемент?в, внасл?док чого, спов?льнюються ? частково поглинаються. Частина, що залишилася нейтрон?в в?дбива?ться ? ре?стру?ться приймачем. Точн? вим?ри можлив? до глибини 50?70 см. Кр?м активного обстеження поверхн? Червоно? планети, прилад здатний вести мон?торинг природного рад?ац?йного фону поверхн? (пасивне обстеження)
[39]
.
- Rover environmental monitoring station
(
REMS
): Метеоролог?чний комплекс прилад?в для вим?рювання атмосферного тиску, вологост?, напряму в?тру, пов?тряних ? наземних температур, ультраф?олетового випром?нювання. REMS дасть нов? уявлення про м?сцевий г?дролог?чний стан, про руйн?вний вплив ультраф?олетового випром?нювання й про можлив? ознаки життя в поверхневому ?рунт? планети. Досл?дницька група на чол? з Хав'?ром Гомес-Ельв?ром, Центру астроб?олог?? (Мадрид) включа? Ф?нський Метеоролог?чний ?нститут як партнера. Встановили ?? на щоглу камери для вим?рювання атмосферного тиску, вологост?, напрямку в?тру, пов?тряних ? наземних температур, ультраф?олетового випром?нювання. Ус? датчики розташован? в трьох частинах: дв? стр?ли при?днан? до марсоходу, Remote Sensing Mast (
RSM
), Ultraviolet Sensor (
UVS
) розташований на верхн?й щогл? марсохода, ? Instrument Control Unit (
ICU
) всередин? корпусу.
- MSL entry descent and landing instrumentation
(
MEDLI
): Основною метою приладу було вивчення атмосферного середовища на Марс? п?д час спуску п?сля гальмування й в?докремлення теплозахисного екрану. Саме в цей пер?од були з?бран? необх?дн? дан? про марс?анську атмосферу. Ц? дан? будуть використан? в майбутн?х м?с?ях. Прилад склада?ться з трьох основних вузл?в:
MEDLI Integrated Sensor Plugs
(
MISP
),
Mars Entry Atmospheric Data System
(
MEADS
) ?
Sensor Support Electronics
(
SSE
).
- Hazard avoidance cameras
(
Hazcams
): марсох?д ма? дв? пари чорно-б?лих нав?гац?йних камер, розташованих з бок?в апарата. Вони застосовуються для оц?нки небезпеки п?д час пересування марсоходу ? для безпечного наведення ман?пулятора на зразки кам?ння й ?рунту. Камери роблять 3D зображення (поле зору кожно? камери ? 120°), складають карту м?сцевост? попереду марсохода. Складен? карти дають марсоходу змогу уникати випадкових з?ткнень ? використовуються програмним забезпеченням апарата для вибору необх?дного шляху п?д час подолання перешкод.
- Navigation cameras
(
Navcams
): для нав?гац?? марсох?д використову? пару чорно-б?лих камер, як? встановлено на щогл? для стеження за пересуванням. Камери мають 45 градусне поле зору, роблять 3D-зображення. ?х розд?льна здатн?сть да? змогу бачити об'?кт розм?ром 2 сантиметри з в?дстан? 25 метр?в.
Пор?вняння ≪Mars Science Laboratory≫ з ?ншими марсоходами
[
ред.
|
ред. код
]
 Модел? трьох марсоход?в у пор?внянн?: ≪
Соджорнер
≫ (найменший), ≪Оппортьюн?т?≫ (середн?й), ≪К'юр?ос?т?≫ (найб?льший).
Модел? трьох марсоход?в у пор?внянн?: ≪
Соджорнер
≫ (найменший), ≪Оппортьюн?т?≫ (середн?й), ≪К'юр?ос?т?≫ (найб?льший).
|
К'юр?ос?т?
|
MER
|
Sojourner
|
| Запуск
|
2011
|
2003
|
1996
|
| Маса (кг)
|
899
|
174
|
10,6
|
| Розм?ри (у метрах, Д×Ш×В)
|
3,1 × 2,7 × 2,1
|
1,6 × 2,3 × 1,5
|
0,7 × 0,5 × 0,3
|
| Енерг?я (кВт/
сол
)
|
2,5?2,7
|
0,3?0,9
|
< 0,1
|
| Науков? ?нструменти
|
10
|
5
|
4
|
| Максимальна швидк?сть (см/сек)
|
4
|
5
|
1
|
| Передача даних (МБ/добу)
|
19?31
|
6?25
|
< 3,5
|
| Продуктивн?сть (
MIPS
)
|
400
|
20
|
0,1
|
| Пам'ять (МБ)
|
256
|
128
|
0,5
|
| Розрахунковий район посадки (км)
|
20 × 7
|
80 × 12
|
200 × 100
|
Посадковий модуль в?докремився в?д перельотного модуля перед входом в атмосферу. Для гальмування посадкового модуля спочатку використовувався оп?р атмосфери, пот?м парашут, ?, нарешт?, гальм?вн? двигуни. Сам посадковий модуль не одразу торкнувся поверхн? планети ? на певн?й висот? ровер опустився на тросах, як? пот?м в?д'?дналися, а посадковий модуль в?длет?в уб?к, щоб не забруднювати реактивними вихлопами м?сце посадки ровера.
6 серпня 2012 року косм?чний апарат ≪К'юр?ос?т?≫ зд?йснив усп?шну посадку на
Марс
у кратер? ?ейла. Трансляц?я посадки в прямому еф?р? зд?йснювалася на сайт?
НАСА
.
Посадка апарата на поверхню була ун?кальною операц??ю, яку ще н?коли не виконували. Ун?кальн?сть зумовлена використанням ново? технолог?? Sky Crane для посадки апарат?в на поверхню.
Планована схема посадки ≪К'юр?ос?т?≫
Спуск на поверхню Марса велико? маси дуже складний. Атмосфера занадто розр?джена, щоб парашути й аеродинам?чне гальмування виявилися ефективними, однак занадто щ?льна, щоб забезпечити ?стотне гальмування ракетними двигунами, оск?льки використання тяги реактивного струменя на надзвукових швидкостях пов'язане з нестаб?льн?стю
[
джерело?
]
. Попередн? м?с?? використовували аеробалони для пом'якшення удару п?д час посадки, але новий марсох?д занадто важкий для використання такого вар?анту.
| Landing on Mars
|
|---|
| Спуск марсохода ≪К'юр?ос?т?≫ (в?део-02: 26; 6 Серпня 2012)
| Спуск марсохода ≪К'юр?ос?т?≫ (в?део-02: 26; 6 Серпня 2012)
|
|
| Curiosity
rover
|
|---|
 Щогла з камерами ChemCam, MastCam-34, MastCam-100, NavCam. Щогла з камерами ChemCam, MastCam-34, MastCam-100, NavCam.
| Щогла з камерами ChemCam, MastCam-34, MastCam-100, NavCam.
|
 Колесо ровера, д?аметром 50 см. Колесо ровера, д?аметром 50 см.
| Колесо ровера, д?аметром 50 см.
|
|
-
Марсох?д ≪К'юр?ос?т?≫ п?д парашутом (6.08.2012;
MRO
).
-
Ляскання парашута ≪К'юр?ос?т?≫ (12.08.2012?13.08.2013;
MRO
)
-
М?сце посадки ≪К'юр?ос?т?≫ на
Aeolis Palus
б?ля
Mount Sharp
(п?вн?ч внизу).
-
Mount Sharp
п?дн?ма?ться з середини
кратера ?ейла
; Зелена точка ≪К'юр?ос?т?≫ ? м?сце посадки (п?вн?ч внизу).
-
Зелена точка м?сце приземлення ≪К'юр?ос?т?≫; верхня синя точка -
Glenelg
; нижня синя точка база
Mount Sharp
.
-
Ел?пс, названий Йеллоукнайф, в?дзнача? м?сце, де ≪К'юр?ос?т?≫ фактично приземлився.
-
Квадрат 51 (розм?ри 1 миля ? довжина, 1 миля ? ширина), д?лянка кратера ?ейл, м?сце приземлення ≪К'юр?ос?т?≫ позначено.
-
Уламки парашута на
debris field
розкидан? в 614 м в?д ≪К'юр?ос?т?≫ (3-D:
rover
&
parachute
) (17.08.2012;
MRO
).
-
М?сце приземлення ≪К'юр?ос?т?≫,
Bradbury Landing
, сфотографоване
MRO
(14.08.2012)
-
Перш? сл?ди ≪К'юр?ос?т?≫, сфотографован?
MRO
/
HiRISE
(6.09.2012)
-
Перший р?к на Марс? ? перша пройдена миля ≪К'юр?ос?т?≫
[40]
(1.08.2013) (3-D
[41]
).
-
В?дкинутий тепловий щит, сфотографований ≪К'юр?ос?т?≫, спуска?ться на поверхню Марса (6.08.2012).
-
Перше фото ≪К'юр?ос?т?≫ п?сля приземлення (6.08.2012). Видно колесо марсохода.
-
Перше фото ≪К'юр?ос?т?≫ п?сля приземлення (без кришки для захисту в?д пилу, 6.08.2012).
-
Приземлення ≪К'юр?ос?т?≫ 6.08.2012 б?ля бази
Aeolis Mons
(або "Mount Sharp").
-
Перше кольорове фото марс?анського пейзажу ≪К'юр?ос?т?≫, зроблене
MAHLI
(6.08.2012).
-
Селф? ≪К'юр?ос?т?≫ з закритою кришкою в?д пилу (7.09.2012).
-
Селф? ≪К'юр?ос?т?≫ (7.09.2012; з корекц??ю кольору).
-
Кал?бровка
MAHLI
(9 Вересня, 2012; альтернативна 3D-верс?я
[42]
)
-
Американський цент на Марс? (≪К'юр?ос?т?≫; 10.09.2012)
[42]
.
-
Колеса ≪К'юр?ос?т?≫.
Mount Sharp
на фон? (
MAHLI
, 9.09.2012).
-
Сл?ди ≪К'юр?ос?т?≫ на першому тест-драйв? (22.08.2012).
-
Збалансован? кольори фото на
Aeolis Mons
на Марс? (23.08.2012)
-
≪К'юр?ос?т?≫ кри?вид
Aeolis Mons
(9.08.2012;
-
Прошарки на баз?
Aeolis Mons
. Темний кам?нь на зб?льшеному фото такого ж розм?ру, як ≪К'юр?ос?т?≫.
Перша кругова панорама ≪К'юр?ос?т?≫ (8.08.2012).
Панорама ≪К'юр?ос?т?≫ кра?виду
Glenelg
, в?дстань близько 200 м, вважа?ться важливим м?сцем для науки (19.09.2012).
Кра?вид
неба Марса
на сход? Сонця (лютий 2013 року; сх?д Сонця змодельований художником).
На початку 2018 р. опубл?кована панорама, одержана з? зн?мк?в жовтня 2017 р. Зн?мки були зроблен? з м?сцевост?, яка назива?ться хребет В?ри Руб?н. Ч?тко видн? особливост? рель?фу в кратер? Гейла, об?док самого кратера ? нав?ть гора, яка розташована на в?дстан? понад 80 км в?д нього
[43]
.
- Детальн? зн?мки Марса з ровера ≪К'юр?ос?т?≫ виявили сл?ди повеней ? паводк?в, як? в?дбувалися 4 млрд рок?в тому
[44]
.
- Станом на 16 кв?тня 2020 року ровер перебував на в?дстан? 21,66 мил? в?д м?сця посадки
[45]
.
- Станом на 31 березня 2021 року ≪К'юр?ос?т?≫ почав наближатися до г?рського утворення, яке вчен? назвали
Mont Mercou
(Мон-Мерку) на честь гори у Франц??. Марсох?д взяв уже 30 зразк?в породи шляхом вибурювання свердловин
[46]
.
- 15 кв?тня 2023 року ≪К'юр?ос?т?≫ наткнувся на Марс? на об'?кт у форм?
книги
. Дивна форма марс?анських скель, под?бна до знайдено?, зазвичай поясню?ться водою, що сочилася в цьому район? м?льярди рок?в тому, коли марс був набагато волог?шим, ? пов?домили представники
НАСА
[47]
[48]
.
- Станом на 31 травня 2023 року ≪К'юр?ос?т?≫ здолав 30 км у кратер? Гейл на Червон?й планет?
[49]
[50]
.
- У кв?тн? 2023 року ≪К'юр?ос?т?≫ знайшов на Марс? об'?кт у вигляд?
гребеня
з шипами, що викликало жвав? суперечки пом?ж вченими щодо його походження
[51]
[52]
[53]
.
- 29 березня 2024 року, зг?дно пов?домлення NASA, ≪К'юр?ос?т?≫ розпочав досл?дження нового рег?ону Марса, а саме каналу Гед?з Валл?с, який звивистою формою нагаду? р?чку
[54]
[55]
.
- ↑
Стан м?с?? Mars Science Laboratory
[
Арх?вовано
28 листопада 2011 у
Wayback Machine
.]
(англ.)
- ↑
Webster, Guy; Brown, Dwayne (22 липня 2011).
NASA's Next Mars Rover To Land At Gale Crater
.
NASA JPL
.
Арх?в
ориг?налу за 16 липня 2013
. Процитовано 22 липня 2011
.
- ↑
Chow, Dennis (22 липня 2011).
NASA's Next Mars Rover to Land at Huge Gale Crater
.
Space.com
.
Арх?в
ориг?налу за 16 липня 2013
. Процитовано 22 липня 2011
.
- ↑
Amos, Jonathan (22 липня 2011).
Mars rover aims for deep crater
.
BBC News
. Арх?в
ориг?налу
за 22 липня 2011
. Процитовано 22 липня 2011
.
- ↑
Troubles parallel ambitions in NASA Mars project
. Арх?в
ориг?налу
за 31 липня 2009
. Процитовано 18 грудня 2014
.
- ↑
Mars Science Laboratory Size Video
. NASA/JPL.
Арх?в
ориг?налу за 20 лютого 2012
. Процитовано 18 грудня 2014
.
- ↑
а
б
Watson, Traci (14 кв?тня 2008).
Troubles parallel ambitions in NASA Mars project
.
USA Today
. Арх?в
ориг?налу
за 31 липня 2009
. Процитовано 27 травня 2009
.
- ↑
Mars Rovers: Pathfinder, MER (Spirit and Opportunity), and MSL
(video). Pasadena, California. 12 кв?тня 2008
. Процитовано 22 вересня 2011
.
Арх?вована коп?я
. Арх?в
ориг?налу
за 26 липня 2013
. Процитовано 18 грудня 2014
.
{{
cite web
}}
: Обслуговування CS1: Стор?нки з текстом ≪archived copy≫ як значення параметру title (
посилання
)
- ↑
MER Launch Press Kit
(PDF)
.
Арх?в
(PDF)
ориг?налу за 9 червня 2013
. Процитовано 18 грудня 2014
.
- ↑
Mars Science Laboratory ? Homepage
. NASA. Арх?в
ориг?налу
за 13 лютого 2006
. Процитовано 22 вересня 2011
.
- ↑
а
б
в
Multi-Mission Radioisotope Thermoelectric Generator
(PDF)
. NASA/JPL. 1 с?чня 2008. Арх?в
ориг?налу
(PDF)
за 17 серпня 2012
. Процитовано 7 вересня 2009
.
- ↑
а
б
в
Mars Exploration: Radioisotope Power and Heating for Mars Surface Exploration
(PDF)
. NASA/JPL. 18 кв?тня 2006.
Арх?в
(PDF)
ориг?налу за 17 серпня 2012
. Процитовано 7 вересня 2009
.
- ↑
а
б
Mars Science Laboratory Launch Nuclear Safety
(PDF)
. NASA/JPL/DoE. 2 березня 2011.
Арх?в
(PDF)
ориг?налу за 17 серпня 2012
. Процитовано 28 листопада 2011
.
- ↑
а
б
Technologies of Broad Benefit: Power
. Арх?в
ориг?налу
за червень 14, 2008
. Процитовано 20 вересня 2008
.
- ↑
Mars Science Laboratory ? Technologies of Broad Benefit: Power
. NASA/JPL.
Арх?в
ориг?налу за 17 серпня 2012
. Процитовано 23 кв?тня 2011
.
- ↑
Ajay K. Misra (26 червня 2006).
Overview of NASA Program on Development of Radioisotope Power Systems with High Specific Power
(PDF)
. NASA/JPL.
Арх?в
(PDF)
ориг?налу за 17 серпня 2012
. Процитовано 12 травня 2009
.
- ↑
а
б
Susan Watanabe (9 серпня 2009).
Keeping it Cool (...or Warm!)
. NASA/JPL. Арх?в
ориг?налу
за 17 серпня 2012
. Процитовано 19 с?чня 2011
.
- ↑
Израильтяне оставили свой след на Марсе
. Арх?в
ориг?налу
за 24 серпня 2012
. Процитовано 19 грудня 2014
.
- ↑
а
б
в
г
д
Mars Science Laboratory: Mission: Rover: Brains
. NASA/JPL.
Арх?в
ориг?налу за 17 серпня 2012
. Процитовано 27 березня 2009
.
- ↑
Print Page ? Curiosity lands successfully, kicks off new era in Mars exploration | ExtremeTech
. Арх?в
ориг?налу
за 20 грудня 2014
. Процитовано 19 грудня 2014
.
- ↑
Bajracharya, Max; Mark W. Maimone; Daniel Helmick (December 2008). Autonomy for Mars rovers: past, present, and future.
Computer
.
41
(12): 45.
doi
:
10.1109/MC.2008.9
.
ISSN
0018-9162
.
- ↑
BAE Systems Computers to Manage Data Processing and Command For Upcoming Satellite Missions
(Пресрел?з). BAE Systems. 17 червня 2008. Арх?в
ориг?налу
за 6 вересня 2008
. Процитовано 17 листопада 2008
.
- ↑
E&ISNow ? Media gets closer look at Manassas
(PDF)
. BAE Systems. 1 серпня 2008. Арх?в
ориг?налу
(PDF)
за 17 грудня 2008
. Процитовано 17 листопада 2008
.
- ↑
RAD750 radiation-hardened PowerPC microprocessor
(PDF)
. BAE Systems. 1 липня 2008. Арх?в
ориг?налу
(PDF)
за 12 березня 2011
. Процитовано 7 вересня 2009
.
- ↑
RAD6000 Space Computers
(PDF)
. BAE Systems. 23 червня 2008. Арх?в
ориг?налу
(PDF)
за жовтень 4, 2009
. Процитовано 7 вересня 2009
.
- ↑
Andre Makovsky, Peter Ilott, Jim Taylor (2009).
Mars Science Laboratory Telecommunications System Design
(PDF)
. JPL.
Арх?в
(PDF)
ориг?налу за 17 серпня 2012
. Процитовано 19 грудня 2014
.
- ↑
Mars Science Laboratory: Curiosity Stretches its Arm
. Арх?в
ориг?налу
за 22 серпня 2012
. Процитовано 21 грудня 2014
.
- ↑
Mars Science Laboratory: Arm and Hand
. Арх?в
ориг?налу
за 26 серпня 2012
. Процитовано 21 грудня 2014
.
- ↑
Арх?вована коп?я
(PDF)
. Арх?в
ориг?налу
(PDF)
за 24 листопада 2013
. Процитовано 21 грудня 2014
.
{{
cite web
}}
: Обслуговування CS1: Стор?нки з текстом ≪archived copy≫ як значення параметру title (
посилання
)
- ↑
Curiosity взял образец атмосферы Марса для анализа
. Арх?в
ориг?налу
за 13 грудня 2013
. Процитовано 21 грудня 2014
.
- ↑
Марс испарят лазером
: [
арх.
25 лютого 2014
] //
Популярная механика
: журнал. ? 2011. ? № 4 (102). ? С. 37.
- ↑
New Mars Rover to Feature Morse Code
. National Association for Amateur Radio.
Арх?в
ориг?налу за 17 серпня 2012
. Процитовано 21 грудня 2014
.
- ↑
MSL Science Corner: Chemistry & Mineralogy (CheMin)
. NASA/JPL.
Арх?в
ориг?налу за 5 листопада 2012
. Процитовано 21 грудня 2014
.
- ↑
Nasa.gov ? MSL Science Corner: Sample Analysis at Mars (SAM)
. Арх?в
ориг?налу
за 18 листопада 2021
. Процитовано 21 грудня 2014
.
- ↑
Nasa.gov ? Sample Ananlysis at Mars on the rover Curiosity
. Арх?в
ориг?налу
за 5 листопада 2012
. Процитовано 21 грудня 2014
.
- ↑
Space Science Reviews, The Sample Analysis at Mars Investigation and Instrument Suite, DOI: 10.1007/s11214-012-9879-z 2012
[
недоступне посилання з листопадаа 2019
]
- ↑
ФЕДЕРАЛЬНОЕ КОСМИЧЕСКОЕ АГЕНТСТВО (РОСКОСМОС)| Российский нейтронный детектор ДАН для проекта мобильного посадочного аппарата НАСА ≪Марсианская научная лаборатория≫
. Арх?в
ориг?налу
за 21 с?чня 2012
. Процитовано 21 грудня 2014
.
- ↑
Лаборатория космической гамма-спектроскопии ? ДАН
. Арх?в
ориг?налу
за 2 грудня 2014
. Процитовано 21 грудня 2014
.
- ↑
Журнал Новости Космонавтики ? Журнал
. Арх?в
ориг?налу
за 1 лютого 2014
. Процитовано 21 грудня 2014
.
- ↑
mars.nasa.gov.
Where is Curiosity? Location Map
.
NASA Mars Exploration
(англ.)
. Процитовано 6 грудня 2023
.
- ↑
https://photojournal.jpl.nasa.gov/jpeg/PIA16210.jpg
- ↑
а
б
https://mars.nasa.gov/images/MAHLIcaltarget-br2.jpg
- ↑
Марсох?д Curiosity показав панораму Червоно? планети
. Арх?в
ориг?налу
за 2 лютого 2018
. Процитовано 2 лютого 2018
.
- ↑
Ровер Curiosity знайшов сл?ди древн?х повеней на Марс?
- ↑
MSL Notebook - Curiosity Mars Rover data
.
an.rsl.wustl.edu
. Арх?в
ориг?налу
за 11 листопада 2020
. Процитовано 20 кв?тня 2020
.
- ↑
Марсох?д NASA Curiosity над?слав нове селф? з г?рським утворенням
. Арх?в
ориг?налу
за 31 березня 2021
. Процитовано 1 кв?тня 2021
.
- ↑
Curiosity rover finds water-carved 'book' rock on Mars (photo). // By Elizabeth Howell, published 11 May 2023
- ↑
Марсох?д Curiosity виявив на Марс? скелю у вигляд? книги, вис?чену водою ? фото. 15.05.2023
- ↑
I just reached a milestone only surpassed by Opportunity: 30 km on Mars. 31.05.2023
- ↑
Марсох?д Curiosity здолав вже 30 к?лометр?в на Червон?й планет?. 31.05.2023, 10:19
- ↑
NASA's Curiosity rover spots a strange bone-like rock on Mars ? as one expert calls it the most bizarre structure she's EVER seen on the Red Planet. // By Fiona Jackson. Updated: 15:56 BST, 13 April 2023
- ↑
Has an alien spaceship crash-landed on Mars? Mysterious debris spotted on the Red Planet could be from an extraterrestrial vehicle, study claims. // By Sam Tonkin. Updated: 15:00 BST, 24 July 2023
- ↑
Корабель ?нопланетян? Учен? сперечаються про походження незвичайного об'?кта на Марс?. 25.07.2023
- ↑
NASA’s Curiosity Searches for New Clues About Mars’ Ancient Water. Mar 29, 2024
- ↑
Марсох?д NASA досл?джу? новий рег?он на Червон?й планет?. 30.03.2024, 17:05
|
|---|
| | Д?юч? м?с??
|
| |
|---|
| | Завершен? м?с??
|
Прол?тн?
|
|
|---|
| Орб?тальн?
|
|
|---|
| Посадков?
|
|
|---|
| Марсоходи
|
|
|---|
| Спец?альн?
|
|
|---|
|
|---|
| | Авар?? п?д час старту
|
|
|---|
| | Запланован?
|
|
|---|
| | Запропонован?
|
|
|---|
| | Скасован? концепти
|
|
|---|
|
†
вказу? на несправн?сть комун?кац??, через яку дан? м?с?? не були отриман?
|
|
|
|---|
| Пол?тика США
у галуз? космосу
та ?стор?я
|
| |
|---|
| Роботизован?
косм?чн? програми
|
|
|---|
| П?лотований
косм?чний
пол?т
|
|
|---|
| Окрем? м?с??
(п?лотован? або
роботизован?)
|
|
|---|
| Програма косм?чно?
комун?кац?? ? нав?гац??
|
|
|---|
| | Списки НАСА
|
|
|---|
| Св?тлини ? граф?чн?
роботи НАСА
|
|
|---|
| |
|