 O tres tipos de xeometrias homoxeneas posibles, ademais da xeometria euclidiana de curvatura nula, son a
xeometria eliptica
de curvatura positiva, e a
xeometria hiperbolica
de curvatura negativa. Se se consideran xeometrias non euclidianas homoxeneas enton existe unha infinidade de posibles xeometrias, descritas polas
variedades riemannianas
xerais.
O tres tipos de xeometrias homoxeneas posibles, ademais da xeometria euclidiana de curvatura nula, son a
xeometria eliptica
de curvatura positiva, e a
xeometria hiperbolica
de curvatura negativa. Se se consideran xeometrias non euclidianas homoxeneas enton existe unha infinidade de posibles xeometrias, descritas polas
variedades riemannianas
xerais.
Denominase
xeometria non euclidiana
, a calquera forma de
xeometria
cuxos
postulados
e propiedades difiren nalgun punto dos establecidos por
Euclides
nos seus tratado
Elementos
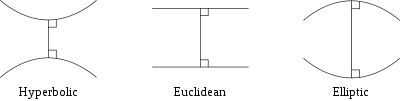
. Non existe un so tipo de xeometria non euclidiana, senon moitos, ainda que se se restrinxe a discusion a espazos homoxeneos, nos que a curvatura do espazo e a mesma en cada punto, nos que os puntos do espazo son indistinguibles poden distinguirse tres tipos de xeometrias:
- A
xeometria euclidiana
satisfai o cinco postulados de Euclides e ten curvatura cero (e dicir suponse nun espazo
plano
polo que a suma do tres angulos interiores dun
triangulo
e sempre 180°.).
- A
xeometria hiperbolica
satisfai so o catro primeiros postulados de Euclides e ten curvatura negativa (nesta xeometria, por exemplo, a suma dos tres angulos interiores dun triangulo e inferior a 180°).
- A
xeometria eliptica
satisfai so os catro primeiros postulados de Euclides e ten curvatura positiva (nesta xeometria, por exemplo, a suma do tres angulos interiores dun triangulo e maior a 180°).
Todos estes son casos particulares de
xeometrias riemannianas
, nos que a curvatura e constante; se se admite a posibilidade de que a curvatura intrinseca da xeometria varie dun punto a outro tense un caso de xeometria riemanniana xeral, como sucede na
teoria da relatividade xeral
, onde a gravidade causa unha curvatura non homoxenea no
espazo-tempo
, sendo maior a curvatura preto das concentracions de masa, o cal se percibe como un campo gravitatorio atractivo.
A xeometria euclideana fora desenvolvida polos gregos e exposta por Euclides na obra
Elementos
. Xa dende a antiguidade considerouse que o quinto postulado do libro de Euclides non era tan evidente como os outros catro pois, ao afirmar que certas rectas (as paralelas) non se cortaran ao prolongalas indefinidamente, fala dunha construcion mental un tanto abstracta. Por iso durante moitos seculos tentouse sen exito demostralo a partir dos outros catro. A principios do seculo XIX, tentouse demostralo por
reducion ao absurdo
, supondo que e falso e tratando de obter unha contradicion. Con todo, lonxe de chegar a un absurdo atopouse que existian xeometrias coherentes diferentes da euclidiana.
Os desenvolvementos de xeometrias non euclidianas xestaronse nos seus comezos co obxectivo de construir modelos explicitos nos que non se cumprise o
quinto postulado de Euclides
. O primeiro exemplo de xeometria non euclidiana foi a
hiperbolica
, teorizada inicialmente por
Immanuel Kant
.
[
1
]
Na sua primeira obra publicada,
Gedanken von der wahren Schatzung der lebendigen Krafte und Beurteilung der Beweise derer sich Herr von
Leibniz
und anderer Mechaniker in dieser Streitsache bedient haben
("Pensamentos sobre a verdadeira estimacion das forzas vivas", 1746),
Immanuel Kant
considerou espazos de mais de tres dimensions e afirmou:
Unha ciencia de todas estas posibles clases de espazo seria sen dubida a empresa mais elevada que un entendemento finito poderia acometer no campo da Xeometria... Se e posible que existan extensions con outras dimensions, tamen e moi probable que Deus as trouxese a existencia, porque as suas obras tenen toda a magnitude e variedade de que son capaces.
Esas posibles xeometrias que Kant entreviu son as que hoxe se chaman xeometrias euclidianas de dimension maior que 3.
A xeometria hiperbolica foi formalizada posterior e independentemente por varios autores a principios do
seculo XIX
tales como
Carl Friedrich Gauss
,
Nikolai Lobachevski
,
Janos Bolyai
e
Ferdinand Schweickard
.
Xeometrias de curvatura constante
[
editar
|
editar a fonte
]
 Modelo do disco Poincare
para a xeometria hiperbolica cunha teselacion {3,7} de rombos truncados.
Modelo do disco Poincare
para a xeometria hiperbolica cunha teselacion {3,7} de rombos truncados.
A principios do seculo XIX, e de xeito independente,
Gauss
(1777-1855),
Lobachevski
(1792-1856),
Janos Bolyai
e
Ferdinand Schweickard
lograron construir a xeometria hiperbolica, a partir do intento de negar o
quinto postulado de Euclides
e tratar de obter unha contradicion. En lugar de obter unha contradicion o que obtiveron foi unha curiosa xeometria na que os tres angulos dun triangulo sumaban menos de 180º sexaxesimais (na xeometria euclidiana os angulos de calquera triangulo suman sempre exactamente 180º).
A naturalidade desta xeometria quedou confirmada a finais do seculo, cando
Beltrami
demostrou que a xeometria hiperbolica coincide coa xeometria intrinseca de certa superficie e
Klein
deu a interpretacion
proxectiva
da xeometria hiperbolica. Ambos os resultados proban que e tan consistente como a xeometria euclidiana (e dicir, se a xeometria hiperbolica leva a algunha contradicion, enton a xeometria euclidiana tamen).
Alguns afirman que
Gauss
foi o primeiro en considerar a posibilidade de que a xeometria do Universo non fose a euclidiana. Sabendo que na xeometria hiperbolica a suma dos angulos de calquera triangulo e menor que dous rectos, dise que subiu a cima de tres montanas cun
teodolito
, ainda que a precision dos seus instrumentos non foi suficiente para decidir a cuestion con ese experimento. Con todo, outros afirman que cando escribiu que trataba de corrixir os efectos de posibles curvaturas se referia a corrixir o efecto da curvatura terrestre nos estudos cartograficos que estaba a realizar.
 A esfera e un modelo de xeometria eliptica bidimensional, os
meridianos
resultan ser
linas xeodesicas
mentres que os
paralelos
son linas de curvatura non minima.
A esfera e un modelo de xeometria eliptica bidimensional, os
meridianos
resultan ser
linas xeodesicas
mentres que os
paralelos
son linas de curvatura non minima.
A xeometria eliptica e o segundo tipo de xeometria non euclidiana homoxenea, e dicir, onde calquera punto do espazo resulta indistinguible de calquera outro. Unha variedade de Riemann de curvatura positiva constante e un exemplo de xeometria eliptica. Un modelo clasico de xeometria eliptica
n
-dimensional e a
n
-
esfera
.
Na xeometria eliptica as linas xeodesicas tenen un papel similar as linas rectas da xeometria euclidea, con algunhas importanes diferenzas. Ainda que a minima distancia posible entre dous puntos ven dada por unha lina xeodesica, que ademais son linas de curvatura minima, o quinto postulado de Euclides non e valido para a xeometria eliptica, xa que dada unha "recta" desta xeometria (e dicir, unha lina xeodesica) e un punto non contido na mesma non se pode trazar ningunha xeodesica que non corte a primeira.
A xeometria euclidiana e claramente un caso limite intermedio entre a xeometria eliptica e a xeometria hiperbolica. De feito a xeometria euclidea e unha xeometria de curvatura nula. Pode demostrarse que calquera espazo xeometrico ou
variedade de Riemann
cuxa curvatura e nula e localmente isometrico ao espazo euclidiano e polo tanto e un espazo euclidiano ou identico a unha porcion do mesmo.
Os espazos de curvatura constante o
tensor de curvatura
de Riemann ven dado en componentes pola seguinte expresion:

onde
 e o
tensor metrico
expresado en
coordenadas curvilineas
calquera. O
tensor de Ricci
e o
tensor metrico
expresado en
coordenadas curvilineas
calquera. O
tensor de Ricci
 e a
curvatura escalar
e a
curvatura escalar
 son proporcionais respectivamente ao tensor metrico e a curvatura:
son proporcionais respectivamente ao tensor metrico e a curvatura:

onde
 e a dimension do espazo.
e a dimension do espazo.
Outro aspecto interesante e que tanto na xeometria hiperbolica, como na xeometria eliptica homoxeneas o grupo de isometria do espazo completo e un
grupo de Lie
de dimension
 , que coincide coa dimension do
grupo de isometria
dun espazo euclidiano de dimension
(ainda que os tres grupos son diferentes).
, que coincide coa dimension do
grupo de isometria
dun espazo euclidiano de dimension
(ainda que os tres grupos son diferentes).
Xeometrias de curvatura non constante
[
editar
|
editar a fonte
]
A proposta de Gauss, a disertacion de
Riemann
versou sobre a hipotese da Xeometria. Na sua tese, Riemann considera as posibles xeometrias que infinitesimalmente (e dicir, en rexions moi pequenas) sexan euclidianas, cuxo estudo se conece hoxe en dia como
xeometrias riemannianas.
Estas xeometrias resultan en xeral non homoxeneas: algunhas das propiedades do espazo poden diferir dun punto a outro, en particular o valor da curvatura.
Para o estudo destas xeometrias Riemann introduciu o formalismo do tensor de curvatura e demostrou que a xeometria euclidiana, a xeometria hiperbolica e a xeometria eliptica son casos particulares de xeometrias riemanninanas, caracterizadas por valores constantes do tensor de
curvatura
. Nunha xeometria riemanninana xeral, o tensor de curvatura tera valores variables ao longo de diferentes puntos de devandita xeometria.
Iso fai que a xeometria non sexa homoxenea, e permite distinguir uns puntos doutros. Isto e relevante na teoria da relatividade xeral, xa que en principio e posible facer experimentos de medicion de distancias e angulos que permitan distinguir uns puntos do espazo doutros, tal como especifican numerosos experimentos mentais imaxinados por Einstein e outros nos que un experimentador encerrado nunha caixa pode realizar experimentos para decidir a natureza do espazo-tempo que lle rodea.
Finalmente un aspecto interesante da xeometria riemanniana e que se a curvatura non e constante enton o grupo de isometria do espazo ten dimension estritamente menor que
, sendo
a dimension do espazo. En concreto segundo a relatividade xeral un espazo-tempo cunha distribucion moi irregular da materia poderia ter un grupo de isometria trivial de dimension 0.
Xeometria do espazo-tempo e teoria da relatividade
[
editar
|
editar a fonte
]
Baseandose nas ideas e resultados de Riemann, contra 1920
Einstein
abordou na sua Teoria da
Relatividade xeral
a cuestion da estrutura xeometrica do Universo. Nela mostra como a xeometria do
espazo-tempo
ten curvatura, que e precisamente o que se observa como
campo gravitatorio
, e como, baixo a accion da gravidade, os corpos seguen as linas mais rectas posibles dentro de dita xeometria, linas que se denominan
xeodesicas
.
Ademais, a
ecuacion de Einstein
afirma que para cada observador, a curvatura media do espazo coincide, salvo un factor constante, coa
densidade
observada, dando cumprimento asi a fantastica vision de Gauss: a xeometria desentranada polos gregos e a estrutura infinitesimal do espazo; ao xeneralizar dita estrutura xeometrica, ten curvatura.
- ↑
Imre Toth, "Gott und Geometrie: Eine viktorianische Kontroverse,"
Evolutionstheorie und ihre Evolution
, Dieter Henrich, ed. (Schriftenreihe der Universitat Regensburg, band 7, 1982) pp. 141?204.
- N. A'Campoy A. Papadopoulos (2012)
Notes on hyperbolic geometry
, in: Strasbourg Master class on Geometry, pp. 1?182, IRMA Lectures in Mathematics and Theoretical Physics, Vol. 18, Zurich: European Mathematical Society (EMS), 461 pages, SBN
ISBN 978-3-03719-105-7
, DOI 10.4171/105.
- Anderson, James W.
Hyperbolic Geometry
, 2ª edicion, Springer, 2005
- Blumenthal, Leonard M. (1980).
A Modern View of Geometry
. Nova York: Dover.
ISBN
0-486-63962-2
.
- H. S. M. Coxeter
(1942)
Non-Euclidean Geometry
, University of Toronto Press, reissued 1998 by Mathematical Association of America,
ISBN 0-88385-522-4
.
- Jeremy Gray (1989)
Ideas of Space: Euclidean, Non-Euclidean, and Relativistic
, 2ª edicion, Clarendon Press.
- Manning, Henry Parker (1963).
Introductory Non-Euclidean Geometry
. Nova York: Dover.
- Milnor, John W. (1982)
Hyperbolic geometry: The first 150 years
, Bull. Amer. Math. Soc. (N.S.) Volume 6, Numero 1, pax. 9?24.
- John Stillwell (1996)
Sources of Hyperbolic Geometry
, American Mathematical Society
ISBN 0-8218-0529-0
.