Here are
249 public repositories
matching this topic...
Central repository for tools, tutorials, resources, and documentation for robotics simulation in Unity.
A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives
An Inverse Kinematics library aiming performance and modularity
-
Updated
May 30, 2024
-
Python
An add-on for Blender allowing to create URDF, SDF and SMURF robot models in a WYSIWYG environment.
-
Updated
Jun 6, 2024
-
Python
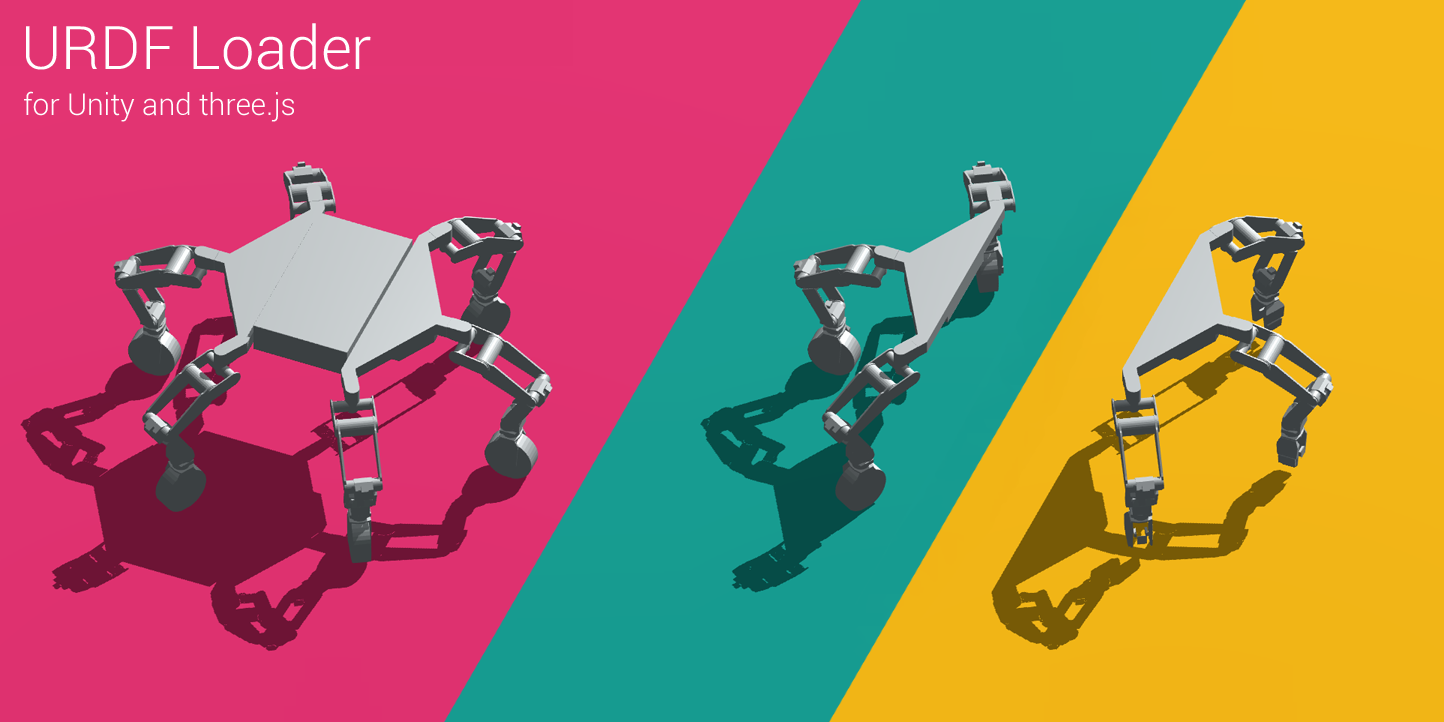
URDF Loaders for Unity and THREE.js with example ATHLETE URDF Files open sourced from NASA JPL
-
Updated
May 23, 2024
-
JavaScript
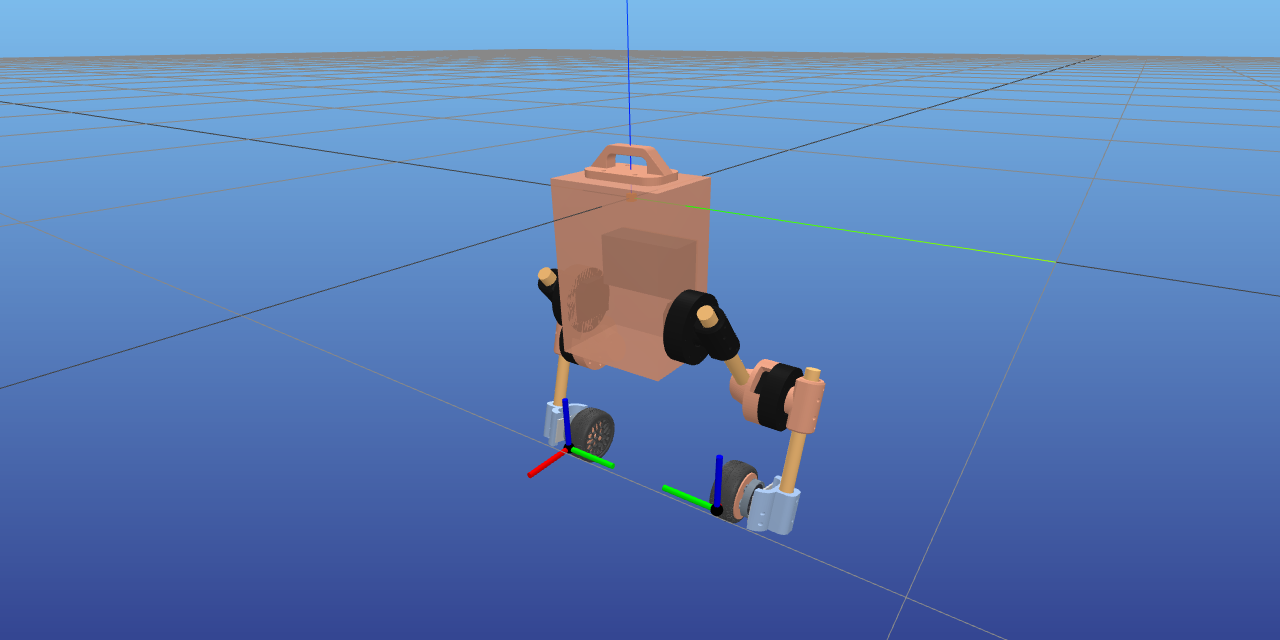
visualize URDF/XACRO file, URDF Viewer works on Windows/MacOS/Linux
-
Updated
May 31, 2024
-
Rust

A curated list of awesome robot descriptions (URDF, MJCF)
A complete end-to-end demonstration in which we collect training data in Unity and use that data to train a deep neural network to predict the pose of a cube. This model is then deployed in a simulated robotic pick-and-place task.
-
Updated
Apr 13, 2022
-
Python
Converting OnShape assembly to robot definition (SDF or URDF) through OnShape API
-
Updated
Jun 3, 2024
-
Python

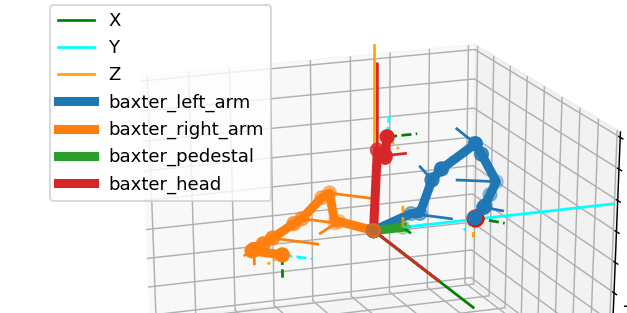
Access 85+ robot descriptions from the main Python robotics frameworks
-
Updated
Jun 5, 2024
-
Python

A generalized inverse kinematics solver that supports closed chains for parallel kinematics systems, dynamic reconfiguration, and arbitrary joint configuration based on damped least squares error minimization techniques
-
Updated
May 2, 2024
-
JavaScript
Python inverse kinematics based on Pinocchio
-
Updated
May 30, 2024
-
Python
Multibody Dynamics Library designed for Free Floating Robots

Open-source diff drive robot ROS 2 compatible
Simple kinematics calculation toolkit for robotics
-
Updated
Jun 3, 2024
-
Python
Improve this page
Add a description, image, and links to the
urdf
topic page so that developers can more easily learn about it.
Curate this topic
Add this topic to your repo
To associate your repository with the
urdf
topic, visit your repo's landing page and select "manage topics."
Learn more
You can’t perform that action at this time.
