Here are
225 public repositories
matching this topic...

The Time Series Visualization Tool that you deserve.
Cross-platform ground control station for drones (Android, iOS, Mac OS, Linux, Windows)
Open source software for autonomous drones.
UAV Simulation Platform based on PX4, ROS and Gazebo

WFB-NG - the next generation of long-range packet radio link based on raw WiFi radio
-
Updated
May 28, 2024
-
Python
Aggressive trajectory tracking using mavros for PX4 enabled vehicles
ROS-based framework and RPi image to control PX4-powered drones ??
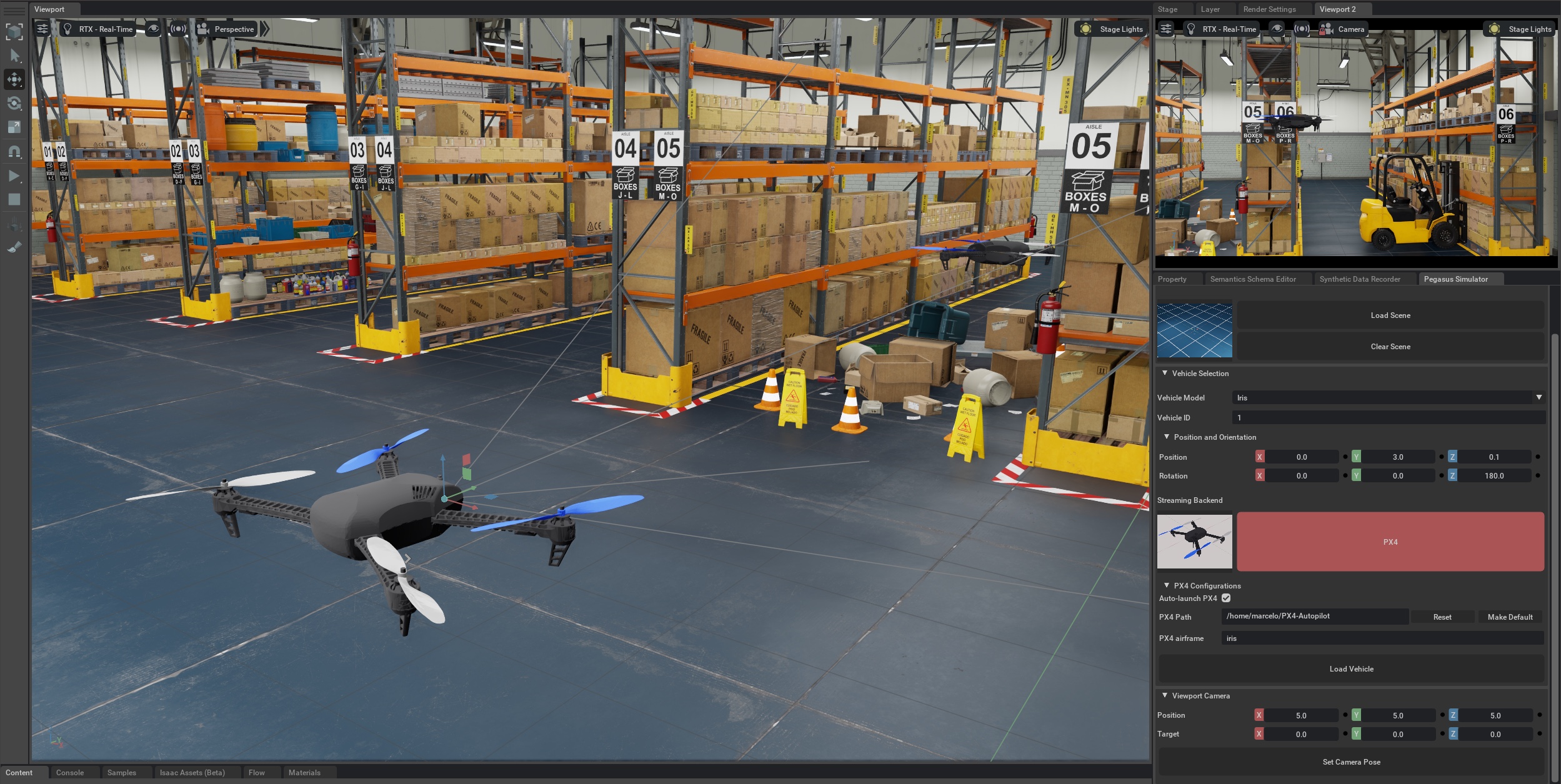
A framework built on top of NVIDIA Isaac Sim for simulating drones with PX4 support and much more
-
Updated
Jun 10, 2024
-
Python
Sapog - advanced multiplatform ESC firmware
web application for flight log analysis & review
-
Updated
May 29, 2024
-
Python
Quadcopter Simulation and Control. Dynamics generated with PyDy.
-
Updated
Jun 7, 2023
-
Python
In-Flight Analysis for PX4
ROS Error-State Kalman Filter based on PX4/ecl. Performs GPS/Magnetometer/Vision Pose/Optical Flow/RangeFinder fusion with IMU
This repository intends to enable autonomous drone delivery with the Intel Aero RTF drone and PX4 autopilot. The code can be executed both on the real drone or simulated on a PC using Gazebo. Its core is a robot operating system (ROS) node, which communicates with the PX4 autopilot through mavros. It uses SVO 2.0 for visual odometry, WhyCon for …
Robot Vulnerability Database. An archive of robot vulnerabilities and bugs.
-
Updated
May 22, 2023
-
Python
Standard NuttX with current PX4 patches
Data Driven Dynamics Modeling for Aerial Vehicles
-
Updated
Nov 24, 2023
-
Python
Obstacle avoidance using RGBD Camera and PX4-Autopilot firmware.
Improve this page
Add a description, image, and links to the
px4
topic page so that developers can more easily learn about it.
Curate this topic
Add this topic to your repo
To associate your repository with the
px4
topic, visit your repo's landing page and select "manage topics."
Learn more
You can’t perform that action at this time.
