Here are
289 public repositories
matching this topic...
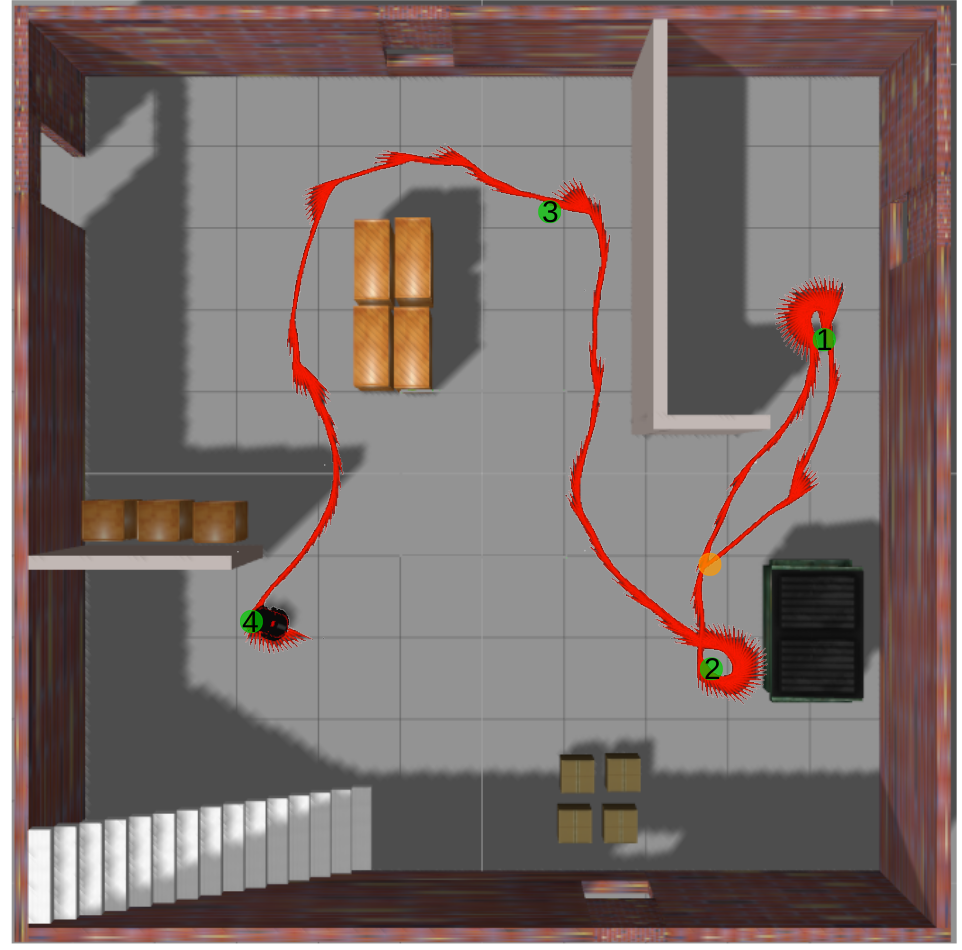
Deep Reinforcement Learning for mobile robot navigation in ROS Gazebo simulator. Using Twin Delayed Deep Deterministic Policy Gradient (TD3) neural network, a robot learns to navigate to a random goal point in a simulated environment while avoiding obstacles.
-
Updated
Aug 4, 2023
-
Python
Trajectory Planner in Multi-Agent and Dynamic Environments
Implementing Reinforcement Learning, namely Q-learning and Sarsa algorithms, for global path planning of mobile robot in unknown environment with obstacles. Comparison analysis of Q-learning and Sarsa
-
Updated
Apr 25, 2022
-
Python
Detection and Tracking of Moving Objects (DATMO) using sensor_msgs/Lidar.
Open-source Autonomy Software in Rust-lang using gRPC for the Roomba series robot vacuum cleaners. Under development.
-
Updated
Nov 26, 2023
-
Rust
Multi-Purpose MPC for Reference Path Tracking, Time-Optimal Driving and Obstacle Avoidance
-
Updated
Oct 20, 2021
-
Python
Perception-Aware Trajectory Planner in Dynamic Environments
A* Search Algorithm with an Additional Time Dimension to Deal with Dynamic Obstacles
-
Updated
Jun 14, 2021
-
Python
A toolkit for testing control and planning algorithm for car racing.
-
Updated
Apr 19, 2024
-
Python
Implementation of the D* lite algorithm in Python for "Improved Fast Replanning for Robot Navigation in Unknown Terrain"
-
Updated
Nov 26, 2023
-
Python
Several controllers to move Ridgeback mobile-robot and UR5 robotic-arm.
ROS workspace that creates a trajectory for a UAV to follow passing through a set of given waypoints and avoiding a set of given cylindrical obstacles.
-
Updated
Jan 11, 2023
-
Makefile
A goal-driven autonomous exploration through deep reinforcement learning (ICRA 2022) system that combines reactive and planned robot navigation in unknown environments
-
Updated
Feb 5, 2022
-
Python
Obstacle avoidance using RGBD Camera and PX4-Autopilot firmware.
Spherical Vector-based Particle Swarm Optimization
-
Updated
Mar 30, 2024
-
MATLAB
Deep Reinforcement Learning for Fixed-Wing Flight Control with Deep Q-Network
-
Updated
Dec 7, 2016
-
Python
Decentralized Multiagent Trajectory Planner Robust to Communication Delay
LIDAR based Obstacle Avoidance with Reinforcement Learning
-
Updated
Sep 4, 2019
-
Jupyter Notebook
?? A motion planning MATLAB & V-rep implementation for the KUKA LBR iiwa robotic arm, performing null-space reconfiguration for obstacle avoidance.
-
Updated
Dec 27, 2020
-
MATLAB
Model Predictive Control for a quadrotor in static and dynamic environments
-
Updated
Nov 11, 2021
-
Python
Improve this page
Add a description, image, and links to the
obstacle-avoidance
topic page so that developers can more easily learn about it.
Curate this topic
Add this topic to your repo
To associate your repository with the
obstacle-avoidance
topic, visit your repo's landing page and select "manage topics."
Learn more
You can’t perform that action at this time.
