Esempio di funzionamento del momento angolare
Il
momento angolare
(dal
latino
momentum
: movimento, impulso o, in senso traslato, efficacia, influenza
[1]
), o
momento della quantita di moto
, e una
grandezza fisica
di tipo
vettoriale
che rappresenta la quantita che si conserva se un
sistema fisico
e
invariante
sotto
rotazioni spaziali
. Costituisce l'equivalente per le rotazioni della
quantita di moto
per le traslazioni.
[2]
Piu in generale, nelle formulazioni della meccanica discendenti da un
principio variazionale
il momento angolare e definito, in termini del
teorema di Noether
, come la quantita conservata risultante dall'invarianza dell'
azione
rispetto alle rotazioni tridimensionali. Questa formulazione e piu adatta per estendere il concetto di momento angolare ad altri enti, quali ad esempio il
campo elettromagnetico
.
Il momento angolare e uno
pseudovettore
, non uno scalare come l'
azione
.
[2]
Per questo motivo la sua unita di misura nel
Sistema internazionale
(SI) e espressa in
 (kilogrammo per metro quadro su secondo), non in
joule
per
secondo
, anche se le due unita hanno le stesse
dimensioni
fisiche.
[3]
Una grandezza correlata al momento angolare e il
momento angolare specifico
(kilogrammo per metro quadro su secondo), non in
joule
per
secondo
, anche se le due unita hanno le stesse
dimensioni
fisiche.
[3]
Una grandezza correlata al momento angolare e il
momento angolare specifico
 , il quale rappresenta il momento angolare per unita di
massa
, ovvero il momento della
velocita
.
, il quale rappresenta il momento angolare per unita di
massa
, ovvero il momento della
velocita
.
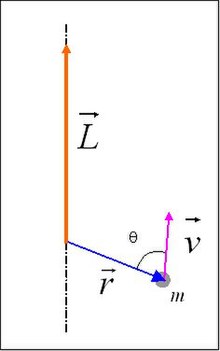 Momento angolare (
Momento angolare (
 ) di un punto materiale di massa
) di un punto materiale di massa
 . Nell'immagine sono indicati il vettore posizione (
. Nell'immagine sono indicati il vettore posizione (
 ) e la velocita (
) e la velocita (
 )
)
Nella
meccanica newtoniana
il momento angolare
 rispetto ad un polo
rispetto ad un polo
 di un
punto materiale
e definito come il
prodotto vettoriale
tra il
vettore
che esprime la posizione
di un
punto materiale
e definito come il
prodotto vettoriale
tra il
vettore
che esprime la posizione
 del punto rispetto a
e il vettore
quantita di moto
del punto rispetto a
e il vettore
quantita di moto
 :
[4]
:
[4]

Il
modulo
di
 e quindi definito da:
[5]
e quindi definito da:
[5]

La direzione di
e perpendicolare al piano definito da
e da
e il verso e quello di un osservatore che vede
ruotare
in senso antiorario. Il vettore
 , che rappresenta la distanza dell'asse di rotazione dalla retta su cui giace
, e detto
braccio
di
.
, che rappresenta la distanza dell'asse di rotazione dalla retta su cui giace
, e detto
braccio
di
.
Se
e
sono tra loro perpendicolari, si ha che
 , pertanto il momento angolare e massimo. Il momento angolare e nullo invece se la quantita di moto o il braccio sono
nulli
, oppure se
e parallelo ad
, in tal caso infatti
, pertanto il momento angolare e massimo. Il momento angolare e nullo invece se la quantita di moto o il braccio sono
nulli
, oppure se
e parallelo ad
, in tal caso infatti
 .
.
Poiche il prodotto di due variabili coniugate, ad esempio posizione e impulso, deve essere un'azione, questo ci dice che la variabile coniugata al momento angolare deve essere adimensionale: infatti e l'angolo di rotazione attorno al polo.
Si definisce
momento angolare assiale
rispetto a un asse
 passante per un punto
la componente ortogonale del momento angolare su un particolare asse
, detto asse centrale:
passante per un punto
la componente ortogonale del momento angolare su un particolare asse
, detto asse centrale:
![{\displaystyle \mathbf {L} _{\hat {z}}:=[(\mathbf {r} \times \mathbf {p} )\cdot {\hat {\mathbf {z} }}]{\hat {\mathbf {n} }}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0665cf8fe3228a6a28a71aa02d1542efd9ad2129)
dove
 e un
versore
, vettore di lunghezza unitaria, che identifica l'asse. Il modulo sara:
e un
versore
, vettore di lunghezza unitaria, che identifica l'asse. Il modulo sara:

dove
 e l'angolo formato dal vettore momento angolare
con l'asse
e l'angolo formato dal vettore momento angolare
con l'asse
 . In pratica e la proiezione ortogonale del momento angolare sull'asse
. Per questo il momento angolare assiale e nullo se l'angolo
. In pratica e la proiezione ortogonale del momento angolare sull'asse
. Per questo il momento angolare assiale e nullo se l'angolo
 e massimo quando l'asse
coincide con l'asse di
, in tal caso infatti:
e massimo quando l'asse
coincide con l'asse di
, in tal caso infatti:
 .
.
Per
sistemi discreti
il momento angolare totale e definito dalla somma dei singoli momenti angolari:
[6]

dove
 e il vettore posizione del punto i-esimo rispetto all'origine,
e il vettore posizione del punto i-esimo rispetto all'origine,
 e la sua massa, e
e la sua massa, e
 e la sua velocita. Sapendo che la massa totale di tutte le particelle e data da:
e la sua velocita. Sapendo che la massa totale di tutte le particelle e data da:

si ha che il centro di massa e definito da:

ne consegue che la velocita lineare del centro di massa e:

Se si definiscono
 il vettore posizione della particella , e
il vettore posizione della particella , e
 la sua velocita rispetto al centro di massa, si ha:
la sua velocita rispetto al centro di massa, si ha:
 e
e

si puo vedere che:
 e
e

cosicche il momento angolare totale rispetto all'origine e:

Il primo termine e semplicemente il momento angolare del centro di massa. E il medesimo momento angolare che si otterrebbe se ci fosse una sola particella di massa
, posta nel centro di massa, che si muove con velocita
 . Il secondo termine e il momento angolare delle particelle relativamente al proprio centro di massa.
[7]
Nei
sistemi continui
si estende in modo naturale la definizione introducendo la
densita
. Il secondo termine e il momento angolare delle particelle relativamente al proprio centro di massa.
[7]
Nei
sistemi continui
si estende in modo naturale la definizione introducendo la
densita
 e il
campo di velocita
e il
campo di velocita
 :
:

Se le particelle formano un
corpo rigido
, il termine che descrive il loro momento angolare rispetto al centro di massa puo essere ulteriormente semplificato. In questo caso, infatti, e possibile legare la sua espressione alla descrizione del moto rotatorio, ovvero alla
velocita angolare
 e alla
velocita areolare
e alla
velocita areolare
 . Se la componente rotatoria e l'unica presente, ovvero nel caso in cui il corpo rigido si muova di
moto circolare
, e pari al prodotto del
tensore di inerzia
. Se la componente rotatoria e l'unica presente, ovvero nel caso in cui il corpo rigido si muova di
moto circolare
, e pari al prodotto del
tensore di inerzia
 e della velocita angolare:
e della velocita angolare:

oppure, analogamente, come il doppio del prodotto tra la massa totale e la velocita areolare:

Lo stesso risultato si ottiene se al sistema di punti materiali discreti esaminato sopra si sostituisce una distribuzione continua di massa.
 Relazione tra forza (
Relazione tra forza (
 ),
momento meccanico
(
),
momento meccanico
(
 ), quantita di moto (
) e momento angolare (
) in un sistema rotante.
), quantita di moto (
) e momento angolare (
) in un sistema rotante.
Per quanto riguarda la dinamica dei sistemi di punti materiali, il momento angolare e una caratteristica fondamentale del moto.
[8]
Infatti se un punto materiale
 si muove con quantita di moto:
si muove con quantita di moto:
 , il momento angolare del punto rispetto a un polo
e dato da:
, il momento angolare del punto rispetto a un polo
e dato da:

se il polo
e in moto con velocita
 , allora il momento angolare varia nel tempo:
, allora il momento angolare varia nel tempo:

dove:
 rappresenta la velocita relativa del punto
rispetto alla velocita di
rappresenta la velocita relativa del punto
rispetto alla velocita di
 per il
secondo principio della dinamica
rappresenta la forza totale risultante.
per il
secondo principio della dinamica
rappresenta la forza totale risultante.
Allora da questa relazione si ricava la
seconda equazione cardinale della dinamica
:

essendo
e
paralleli, il loro prodotto vettoriale e nullo, dunque si ottiene:

dove
 e il
momento meccanico
. Nel caso di un
corpo rigido
rotante, si puo osservare che
rappresenta la
velocita tangenziale
del corpo rotante, pertanto si ha che:
e il
momento meccanico
. Nel caso di un
corpo rigido
rotante, si puo osservare che
rappresenta la
velocita tangenziale
del corpo rotante, pertanto si ha che:

Nei casi in cui:
- il polo sia fermo
- il polo coincida con il centro di massa
- il polo si muova parallelamente alla traiettoria del centro di massa
allora ci si riconduce alla piu familiare:
[9]

Il momento di una forza e definito come il prodotto vettoriale tra il vettore posizione del punto di applicazione della forza, e la forza stessa. Il suo modulo risulta quindi uguale al modulo della forza per il braccio. Si puo dimostrare che se il polo e immobile, la derivata rispetto al tempo del momento angolare e uguale al momento delle forze applicate, cosicche se quest'ultimo momento e nullo allora il momento angolare si conserva.
[8]
Il momento angolare e importante in tutti i moti dipendenti da variazioni che riguardano variabili angolari, inoltre resta fondamentale perche nei
sistemi isolati
, cioe non soggetti a momenti di forze esterne, vale la
legge di conservazione del momento angolare
.
[10]
Viene definito
impulso angolare
la variazione del momento angolare di un corpo che viene sottoposto ad un urto con un altro corpo. In altre parole e il momento angolare effettivamente trasmesso al momento dell'urto. Il momento angolare iniziale e finale, utili per calcolare l'impulso angolare, consistono nei momenti della quantita di moto finale e della quantita di moto iniziale.
[11]
Dunque per calcolare l'impulso angolare in genere si usa misurare massa e velocita del corpo prima del contatto e trarre i dati iniziali e ripetere l'operazione dopo il contatto. Sfruttando la seconda equazione cardinale della dinamica di Eulero e la legge della cinematica di un moto circolare uniforme si ha che:
Integrando rispetto al tempo entrambi i membri si ottiene l'impulso angolare:

Nello studio dei moti in campi di forze centrali, la conservazione del momento angolare e fondamentale, poiche e legata alla costanza della
velocita areolare
. Esempi di questo tipo si riscontrano in meccanica newtoniana, ad esempio nello studio del moto del
pendolo
, e in
meccanica celeste
, dove il
momento angolare orbitale
, definito come il prodotto vettoriale tra la
posizione
e la
quantita di moto
del corpo orbitante al tempo di riferimento, riveste un ruolo chiave per le
leggi di Keplero
e lo studio dei moti dei pianeti, infatti il
momento angolare orbitale specifico
rappresenta una
costante vettoriale
di moto di un'orbita, cioe si conserva nel tempo.
[12]
- ^
[1]
Vocabolario Treccani
- ^
a
b
Parodi Ostili Mochi, 2006
, p. 359
.
- ^
Mazzoldi Nigro Voci, 2010
, p.85
.
- ^
Mazzoldi Nigro Voci, 2010
, p.83
.
- ^
Rosati, 1990
, p.207
.
- ^
Mazzoldi Nigro Voci, 2010
, p.141
.
- ^
Mazzoldi Nigro Voci, 2010
, p.142
.
- ^
a
b
Rosati, 1990
, p.222
.
- ^
Rosati, 1990
, p.205
.
- ^
Rosati, 1990
, p. 223
.
- ^
Bruno Finzi
,
Meccanica Razionale ? Volume 2 ? Dinamica (terza edizione)
, Zanichelli - Bologna, 1995.
p.390
- ^
Mazzoldi Nigro Voci, 2010
, p.362
.
- Sergio Rosati,
Fisica Generale
, Milano, Casa Editrice Ambrosiana, 1990,
ISBN
88-408-0368-8
.
- Paolo Mazzoldi, Massimo Nigro, Cesare Voci,
Fisica - Volume I (seconda edizione)
, Napoli, EdiSES, 2010,
ISBN
88-7959-137-1
.
- Gian Paolo Parodi, Marco Ostili, Guglielmo Mochi Onori,
L'Evoluzione della Fisica-Volume 1
, Paravia, 2006,
ISBN
978-88-395-1609-1
.
- David Halliday, Robert Resnick,
Fundamentals of Physics
, John Wiley & Sons, 1960-2007, pp. Chapter 10.