Here are
425 public repositories
matching this topic...
Official code of "HybrIK: A Hybrid Analytical-Neural Inverse Kinematics Solution for 3D Human Pose and Shape Estimation", CVPR 2021
-
Updated
Feb 10, 2024
-
Python
OpenAI Gym environments for an open-source quadruped robot (SpotMicro)
-
Updated
Mar 24, 2023
-
Python
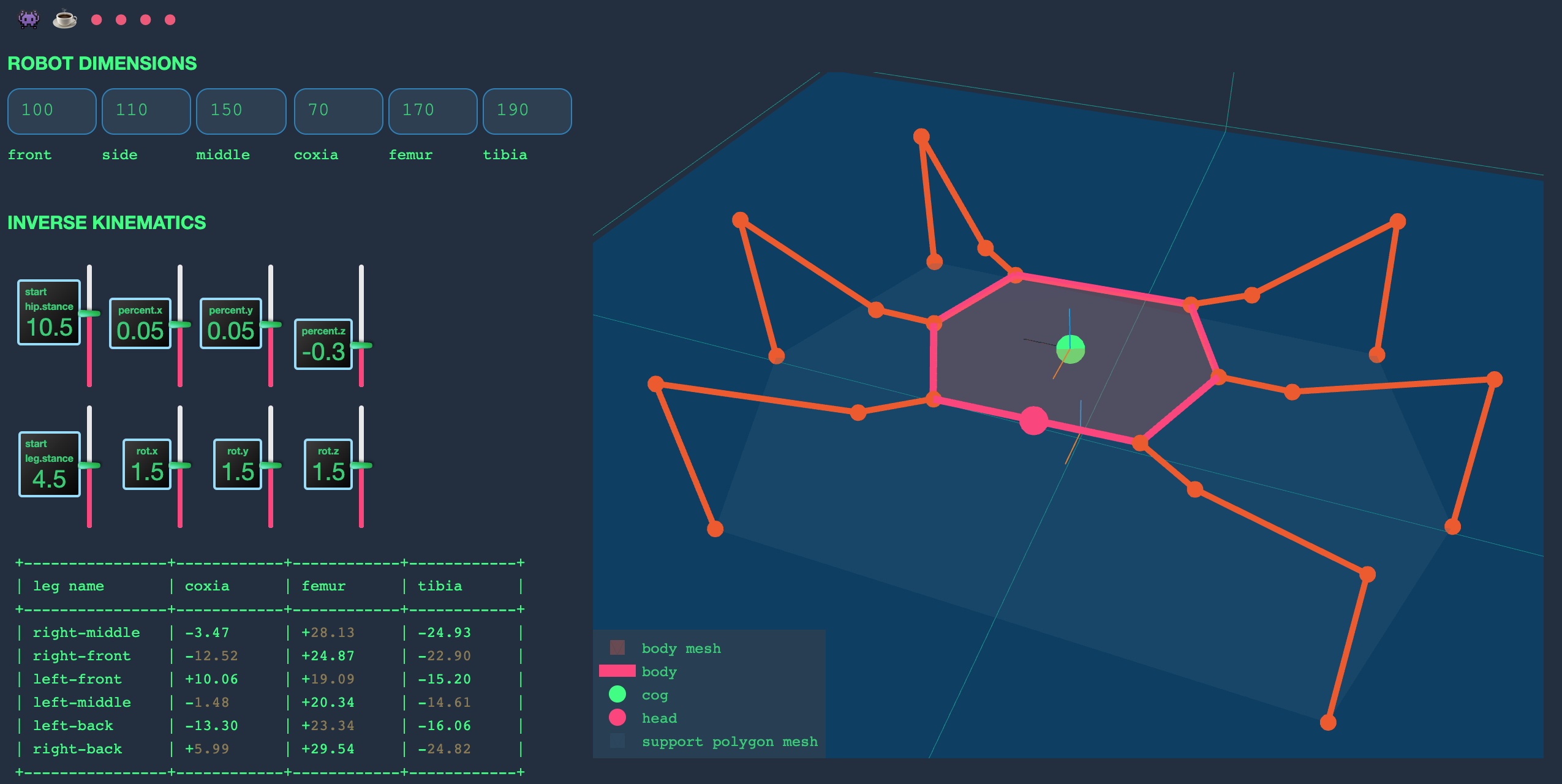
A hexapod robot simulator built from first principles
-
Updated
May 1, 2023
-
Python
P(R*_{3, 0, 1}) specialized SIMD Geometric Algebra Library
An Inverse Kinematics library aiming performance and modularity
-
Updated
May 30, 2024
-
Python
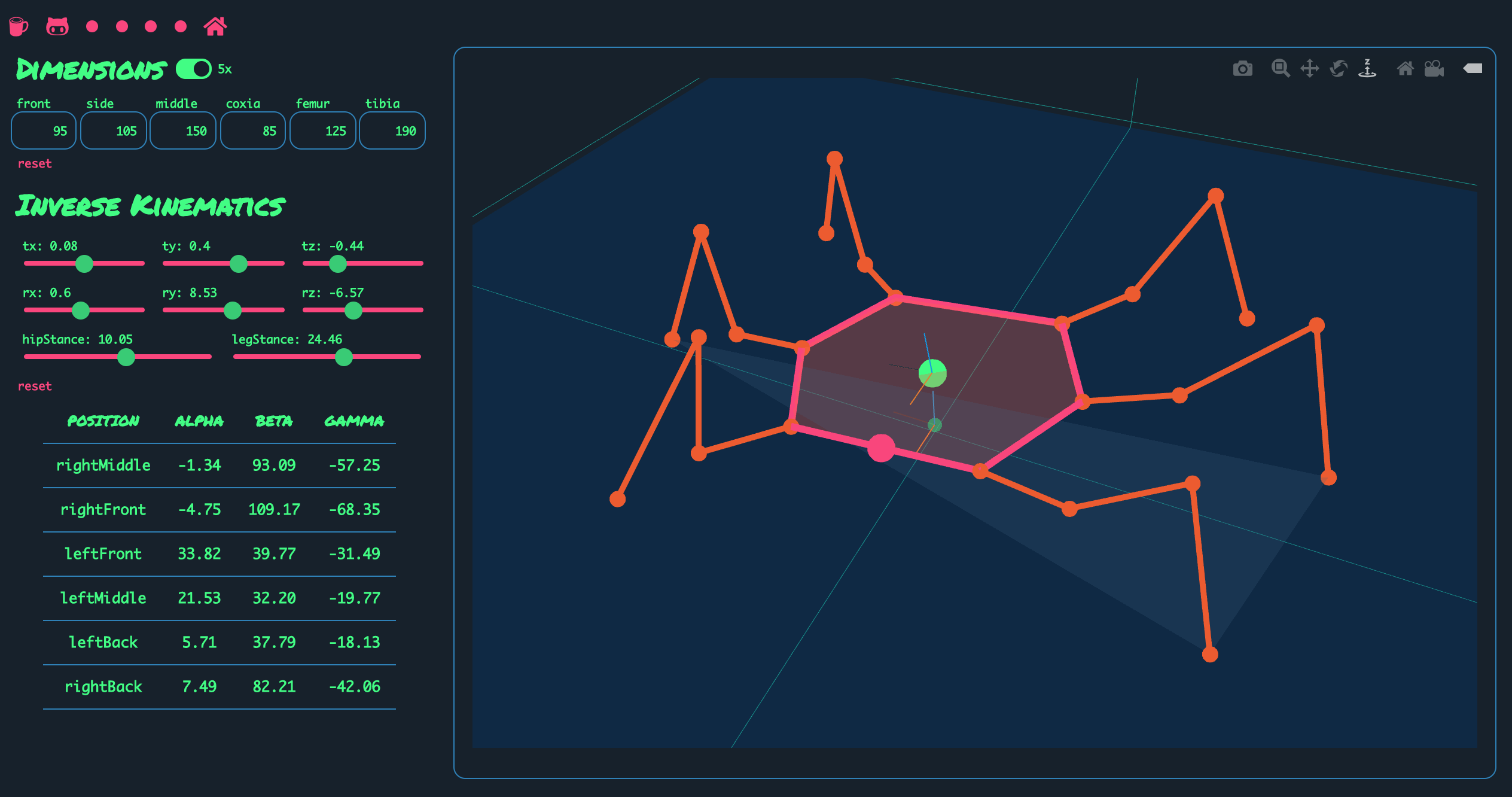
Blazing fast hexapod robot simulator for the web.
-
Updated
Jan 9, 2024
-
JavaScript
RBDL is a C++ library that contains some essential and efficient rigid body dynamics algorithms such as the Articulated Body Algorithm (ABA) for forward dynamics, Recursive Newton-Euler Algorithm (RNEA) for inverse dynamics, the Composite Rigid Body Algorithm (CRBA) for the efficient computation of the joint space inertia matrix and is also able…
Minimal Inverse Kinematics library
inverse kinematics for three.js
-
Updated
Mar 15, 2023
-
JavaScript
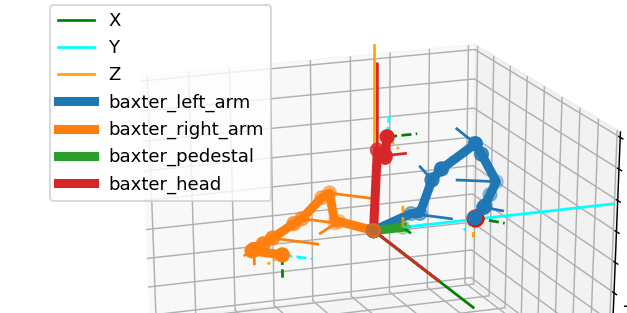
visualize URDF/XACRO file, URDF Viewer works on Windows/MacOS/Linux
-
Updated
May 31, 2024
-
Rust
?? The Full Process Python Package for Robot Learning from Demonstration and Robot Manipulation
-
Updated
Jun 2, 2024
-
Python
Webbased Character Animation System
-
Updated
May 17, 2024
-
TypeScript
A three.js based 3D robot interface.
-
Updated
Jun 26, 2023
-
JavaScript
Procedural animation example in Unity
RPDC : This contains all my MATLAB codes for the Robotics, Planning, Dynamics and Control . The implementations model various kinds of manipulators and mobile robots for position control, trajectory planning and path planning problems.
-
Updated
Jun 18, 2020
-
MATLAB

The Python Toolbox for Robotics
-
Updated
Jun 10, 2024
-
Python
A Tutorial on Manipulator Differential Kinematics
-
Updated
Jul 27, 2023
-
Jupyter Notebook

A Unity Engine Project in which a controllable wall-walking spider uses inverse kinematics (IK) to position its legs to its surroundings, such that it moves realistically.
Robopy is a python port for Robotics Toolbox in Matlab created by Peter Corke
-
Updated
Feb 10, 2021
-
Python
Humanoid robotics prototyping environment based on OpenRAVE
-
Updated
Feb 19, 2024
-
Python
Improve this page
Add a description, image, and links to the
inverse-kinematics
topic page so that developers can more easily learn about it.
Curate this topic
Add this topic to your repo
To associate your repository with the
inverse-kinematics
topic, visit your repo's landing page and select "manage topics."
Learn more
You can’t perform that action at this time.
