Der
Algorithmus von Prim
dient der Berechnung eines
minimalen Spannbaumes
in einem
zusammenhangenden
,
ungerichteten
, kantengewichteten
Graphen
.
Der Algorithmus wurde 1930 vom tschechischen Mathematiker
Vojt?ch Jarnik
entwickelt. 1957 wurde er zunachst von
Robert C. Prim
und dann 1959 von
Edsger W. Dijkstra
wiederentdeckt. Daher wird der
Algorithmus
in der Literatur auch gelegentlich unter anderen Namen gefuhrt, so etwa
Prim-Dijkstra-Algorithmus
oder
Algorithmus von Jarnik, Prim und Dijkstra
, im englischen Sprachraum auch
Jarnik’s algorithm
oder
DJP algorithm
.
Der Prim-Algorithmus hat viele Anwendungen, beispielsweise bei der Erzeugung dieses
Labyrinths
, bei dem der Prim-Algorithmus auf einen zufallig gewichteten Gittergraphen angewendet wird.
Der
Algorithmus
beginnt mit einem trivialen
Graphen
 , der aus einem beliebigen
Knoten
des gegebenen Graphen besteht. In jedem Schritt wird nun eine
Kante
mit minimalem Gewicht gesucht, die einen weiteren Knoten mit
verbindet. Diese und der entsprechende Knoten werden zu
hinzugefugt. Das Ganze wird solange wiederholt, bis alle Knoten in
vorhanden sind; dann ist
ein minimaler Spannbaum:
, der aus einem beliebigen
Knoten
des gegebenen Graphen besteht. In jedem Schritt wird nun eine
Kante
mit minimalem Gewicht gesucht, die einen weiteren Knoten mit
verbindet. Diese und der entsprechende Knoten werden zu
hinzugefugt. Das Ganze wird solange wiederholt, bis alle Knoten in
vorhanden sind; dann ist
ein minimaler Spannbaum:
- Wahle einen beliebigen Knoten als Startgraph
.
- Solange
noch nicht alle Knoten enthalt:
- Wahle eine Kante
 mit minimalem Gewicht aus, die einen noch nicht in
enthaltenen Knoten
mit minimalem Gewicht aus, die einen noch nicht in
enthaltenen Knoten
 mit
verbindet.
mit
verbindet.
- Fuge
und
dem Graphen
hinzu.
Der skizzierte Algorithmus wird durch folgenden
Pseudocode
beschrieben:
G: Graph
V
G
: Knotenmenge von G
w: Gewichtsfunktion fur Kantenlange
r: Startknoten (r ∈ V
G
)
Q: Prioritatswarteschlange
π[u]: Elternknoten von Knoten u im Spannbaum
Adj[u]: Adjazenzliste von u (alle Nachbarknoten)
wert[u]: Abstand von u zum entstehenden Spannbaum
algorithmus_von_prim
(G,w,r)
01 Q
 V
G
//Initialisierung
02
fur alle
u ∈ Q
03 wert[u]
∞
04 π[u]
0
05 wert[r]
0
06
solange
Q ≠
V
G
//Initialisierung
02
fur alle
u ∈ Q
03 wert[u]
∞
04 π[u]
0
05 wert[r]
0
06
solange
Q ≠
 07 u
extract_min
(Q)
08
fur alle
v ∈ Adj[u]
09
wenn
v ∈ Q und w(u,v) < wert[v]
10
dann
π[v]
u
11 wert[v]
w(u,v)
07 u
extract_min
(Q)
08
fur alle
v ∈ Adj[u]
09
wenn
v ∈ Q und w(u,v) < wert[v]
10
dann
π[v]
u
11 wert[v]
w(u,v)
Nachdem der
Algorithmus
endet, ergibt sich der
minimale Spannbaum
wie folgt:
![{\displaystyle T=\left(V_{G},\lbrace \left(u,\pi [u]\right)|u\in V_{G}\backslash \lbrace r\rbrace \rbrace \right)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1f9dd83f30d2e6082f0b753276091776aa37de45)
Zum Finden der leichtesten Schnittkante kann eine
Prioritatswarteschlange
verwendet werden. Dabei werden vom Algorithmus insgesamt
 extractMin-Operationen und
extractMin-Operationen und
 decreaseKey-Operationen ausgefuhrt. Mit einem
Fibonacci-Heap
(extractMin in amortisiert
decreaseKey-Operationen ausgefuhrt. Mit einem
Fibonacci-Heap
(extractMin in amortisiert
 und decreaseKey in amortisiert
und decreaseKey in amortisiert
 ) als
Datenstruktur
ergibt sich eine
Gesamtlaufzeit
von
) als
Datenstruktur
ergibt sich eine
Gesamtlaufzeit
von
 .
.
Die
Schleife
ist inharent sequentiell, da sich die leichteste
Kante
im Schnitt von
 und
und
 mit dem Hinzufugen eines neuen
Knotens
zu
andern kann. Es ist jedoch fur die Korrektheit wichtig, dass immer die aktuell leichteste Kante ausgewahlt wird.
mit dem Hinzufugen eines neuen
Knotens
zu
andern kann. Es ist jedoch fur die Korrektheit wichtig, dass immer die aktuell leichteste Kante ausgewahlt wird.
Auf einer
Parallel Random Access Machine
mit insgesamt
 Prozessoren
lasst sich der Zugriff auf die
Prioritatswarteschlange
zu konstanter Zeit beschleunigen
[1]
, sodass sich eine
Gesamtlaufzeit
in
Prozessoren
lasst sich der Zugriff auf die
Prioritatswarteschlange
zu konstanter Zeit beschleunigen
[1]
, sodass sich eine
Gesamtlaufzeit
in
 ergibt. Insgesamt bieten der
Algorithmus von Kruskal
und der
Algorithmus von Bor?vka
bessere Parallelisierungsansatze.
ergibt. Insgesamt bieten der
Algorithmus von Kruskal
und der
Algorithmus von Bor?vka
bessere Parallelisierungsansatze.
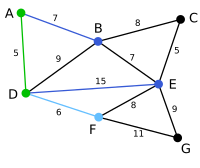
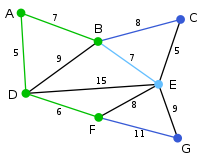
In diesem Beispiel wird der Ablauf des Algorithmus von Prim an einem einfachen
Graphen
gezeigt. Der aktuelle
Baum
ist jeweils grun hervorgehoben. Alle
Knoten
, die im jeweiligen Schritt uber eine einzelne
Kante
mit dem Graphen verbunden werden konnen, sind zusammen mit der jeweiligen Kante geringsten Gewichts blau hervorgehoben. Der Knoten und die Kante, die hinzugefugt werden, sind hellblau markiert.

|
Dies ist der Graph, zu dem der Algorithmus von Prim einen minimalen Spannbaum berechnet. Die Zahlen bei den einzelnen Kanten geben das jeweilige Kantengewicht an.
|

|
Als Startknoten fur den Graphen
wird der Knoten
 gewahlt. (Es konnte auch jeder andere Knoten ausgewahlt werden.) Mit dem Startknoten konnen die Knoten gewahlt. (Es konnte auch jeder andere Knoten ausgewahlt werden.) Mit dem Startknoten konnen die Knoten
 , ,
 , ,
 und und
 jeweils unmittelbar durch die Kanten jeweils unmittelbar durch die Kanten
 , ,
 , ,
 und und
 verbunden werden. Unter diesen Kanten ist
diejenige mit dem geringsten Gewicht und wird deshalb zusammen mit dem Knoten
zum Graphen
hinzugefugt. verbunden werden. Unter diesen Kanten ist
diejenige mit dem geringsten Gewicht und wird deshalb zusammen mit dem Knoten
zum Graphen
hinzugefugt.
|
|
Mit dem bestehenden Graphen
kann der Knoten
durch die Kanten
 oder
, der Knoten
durch die Kante
und der Knoten
durch die Kante
verbunden werden. Unter diesen vier Kanten ist
diejenige mit dem geringsten Gewicht und wird deshalb zusammen mit dem Knoten
zum Graphen
hinzugefugt. oder
, der Knoten
durch die Kante
und der Knoten
durch die Kante
verbunden werden. Unter diesen vier Kanten ist
diejenige mit dem geringsten Gewicht und wird deshalb zusammen mit dem Knoten
zum Graphen
hinzugefugt.
|

|
Mit dem bestehenden Graphen
kann der Knoten
durch die Kanten
oder
, der Knoten
durch die Kanten
oder
 und der Knoten und der Knoten
 durch die Kante durch die Kante
 verbunden werden. Unter diesen Kanten ist
diejenige mit dem geringsten Gewicht und wird deshalb zusammen mit dem Knoten
zum Graphen
hinzugefugt. verbunden werden. Unter diesen Kanten ist
diejenige mit dem geringsten Gewicht und wird deshalb zusammen mit dem Knoten
zum Graphen
hinzugefugt.
|
|
Mit dem bestehenden Graphen
kann der Knoten
 durch die Kante durch die Kante
 , der Knoten
durch die Kanten , der Knoten
durch die Kanten
 ,
oder
und der Knoten
durch die Kante
verbunden werden. Unter diesen Kanten ist
diejenige mit dem geringsten Gewicht und wird deshalb zusammen mit dem Knoten
zum Graphen
hinzugefugt. ,
oder
und der Knoten
durch die Kante
verbunden werden. Unter diesen Kanten ist
diejenige mit dem geringsten Gewicht und wird deshalb zusammen mit dem Knoten
zum Graphen
hinzugefugt.
|

|
Mit dem bestehenden Graphen
kann der Knoten
durch die Kanten
oder
 und der Knoten
durch die Kanten und der Knoten
durch die Kanten
 oder
verbunden werden. Unter diesen Kanten ist
diejenige mit dem geringsten Gewicht und wird deshalb zusammen mit dem Knoten
zum Graphen
hinzugefugt. oder
verbunden werden. Unter diesen Kanten ist
diejenige mit dem geringsten Gewicht und wird deshalb zusammen mit dem Knoten
zum Graphen
hinzugefugt.
|

|
Der verbliebene Knoten
kann durch die Kanten
oder
mit dem Graphen
verbunden werden. Da
unter diesen beiden das geringere Gewicht hat, wird sie zusammen mit dem Knoten
zum Graphen
hinzugefugt.
|

|
Der Graph
enthalt jetzt alle Knoten des Ausgangsgraphen und ist ein minimaler Spannbaum dieses Ausgangsgraphen.
|
Fur eine effiziente
Implementierung
des Algorithmus von Prim muss man moglichst einfach eine
Kante
finden, die man dem entstehenden
Baum
hinzufugen kann. Man benotigt also eine
Prioritatswarteschlange
, in der alle
Knoten
gespeichert sind, die noch nicht zu
gehoren. Alle Knoten haben einen Wert, der dem der leichtesten Kante entspricht, durch die der Knoten mit
verbunden werden kann. Existiert keine solche Kante, wird dem Knoten der Wert
 zugewiesen. Die
Warteschlange
liefert nun immer einen Knoten mit dem kleinsten Wert zuruck.
zugewiesen. Die
Warteschlange
liefert nun immer einen Knoten mit dem kleinsten Wert zuruck.
Die Effizienz des Algorithmus hangt infolgedessen von der Implementierung der
Warteschlange
ab. Bei Verwendung eines
Fibonacci-Heaps
ergibt sich eine optimale
Laufzeit
von
 .
.
Sei
ein
zusammenhangender
, kantengewichteter
Graph
. Bei jeder Iteration des
Algorithmus
muss eine
Kante
gefunden werden, die einen
Knoten
in einem
Teilgraphen
mit einem Knoten außerhalb des Teilgraphen verbindet. Weil
zusammenhangend ist, gibt es immer einen
Pfad
zu jedem Knoten. Der resultierende Graph
des Algorithmus ist ein
Baum
, da die dem Baum hinzugefugte Kante und der Knoten verbunden sind.
Sei
 ein
minimaler Spannbaum
des Graphen
. Wenn
gleich
ist, dann ist
ein minimaler Spannbaum.
ein
minimaler Spannbaum
des Graphen
. Wenn
gleich
ist, dann ist
ein minimaler Spannbaum.
Andernfalls sei
die erste Kante, die wahrend der Konstruktion des Baums
hinzugefugt wird, die sich nicht im Baum
befindet, und
 sei die Menge der Knoten, die durch die vor der Kante
hinzugefugten Kanten verbunden waren. Dann befindet sich ein Knoten der Kante
in der Menge
der schon verbundenen Knoten und der andere nicht. Weil der Baum
ein Spannbaum des Graphen
ist, gibt es im Baum
einen Pfad, der die beiden Endknoten verbindet. Wenn man den Pfad entlang fahrt, muss man auf eine Kante
sei die Menge der Knoten, die durch die vor der Kante
hinzugefugten Kanten verbunden waren. Dann befindet sich ein Knoten der Kante
in der Menge
der schon verbundenen Knoten und der andere nicht. Weil der Baum
ein Spannbaum des Graphen
ist, gibt es im Baum
einen Pfad, der die beiden Endknoten verbindet. Wenn man den Pfad entlang fahrt, muss man auf eine Kante
 stoßen, die einen Knoten der Menge
mit einem Knoten verbindet, der nicht in der Menge
liegt. Bei der Iteration, in der die Kante
zu Baum
hinzugefugt wurde, konnte nun auch die Kante
hinzugefugt worden sein und sie wurde anstelle der Kante
hinzugefugt, wenn ihr Gewicht kleiner als das Gewicht von
ware, und weil die Kante
nicht hinzugefugt wurde, schließen wir daraus, dass ihr Gewicht mindestens so groß ist wie das Gewicht von
.
stoßen, die einen Knoten der Menge
mit einem Knoten verbindet, der nicht in der Menge
liegt. Bei der Iteration, in der die Kante
zu Baum
hinzugefugt wurde, konnte nun auch die Kante
hinzugefugt worden sein und sie wurde anstelle der Kante
hinzugefugt, wenn ihr Gewicht kleiner als das Gewicht von
ware, und weil die Kante
nicht hinzugefugt wurde, schließen wir daraus, dass ihr Gewicht mindestens so groß ist wie das Gewicht von
.
Der Baum
 sei der Graph, der aus
durch Entfernen der Kante
und Hinzufugen der Kante
entsteht. Es ist einfach zu zeigen, dass der Baum
zusammenhangend ist, die gleiche Anzahl von Kanten wie der Baum
hat und das Gesamtgewicht seiner Kanten nicht großer als das von Baum
ist, daher ist
auch ein minimaler Spannbaum des Graphen
und er enthalt die Kante
und alle Kanten, die wahrend der Konstruktion der Menge
hinzugefugt wurden. Wiederholt man die bisherigen Schritte, dann erhalt man schließlich einen minimalen Spannbaum des Graphen
, der mit dem Baum
identisch ist. Dies zeigt, dass
ein minimaler Spannbaum ist.
sei der Graph, der aus
durch Entfernen der Kante
und Hinzufugen der Kante
entsteht. Es ist einfach zu zeigen, dass der Baum
zusammenhangend ist, die gleiche Anzahl von Kanten wie der Baum
hat und das Gesamtgewicht seiner Kanten nicht großer als das von Baum
ist, daher ist
auch ein minimaler Spannbaum des Graphen
und er enthalt die Kante
und alle Kanten, die wahrend der Konstruktion der Menge
hinzugefugt wurden. Wiederholt man die bisherigen Schritte, dann erhalt man schließlich einen minimalen Spannbaum des Graphen
, der mit dem Baum
identisch ist. Dies zeigt, dass
ein minimaler Spannbaum ist.
Wie auch der
Algorithmus von Kruskal
, der ebenfalls einen minimal spannenden Baum konstruiert, ist Prims Algorithmus ein
Greedy-Algorithmus
. Beide
Algorithmen
beginnen mit einem
Graphen
ohne Kanten und fugen in jedem Schritt eine Kante mit minimalem Gewicht hinzu. Sie unterscheiden sich vor allem darin, wie die Bildung eines
Kreises
vermieden wird.
Wahrend der Algorithmus von Kruskal global nach moglichen Kanten mit dem kleinsten Gewicht sucht und bei der Aufnahme dieser Kanten in den Losungsgraph die Kreisbildung aktiv vermeidet, betrachtet der Algorithmus von Prim nur Kanten, die von den Knoten der bisher konstruierten Teilknotenmenge zu Knoten der Komplementarmenge verlaufen. Da aus dieser Kantenmenge eine Kante ausgewahlt wird, vermeidet der Algorithmus per Konstruktion das Auftreten von Kreisen.
Ein Vergleich der
Laufzeit
der beiden
Algorithmen
ist schwierig, da im Algorithmus von Prim die
Knoten
die zentrale Komplexitatsschranke bestimmen, wahrend der Algorithmus von Kruskal auf Basis einer sortierten Kantenliste arbeitet und daher dessen Laufzeit von der Anzahl der
Kanten
dominiert wird.
[2]
 Grafische Darstellung der Aufteilung einer
Adjazenzmatrix
fur die Parallelisierung von Prims Algorithmus. In jeder Iteration des Algorithmus wird von jedem Prozessor sein Teil des Kostenvektors
aktualisiert. Hierfur wird die Reihe des neu gewahlten Knotens in den zugehorigen Spalten des Prozessors betrachtet und anschließend der lokal optimale Knoten bestimmt. Die Ergebnisse aller Prozessoren werden anschließend gesammelt um den nachsten Knoten des Spannbaums zu bestimmen
Grafische Darstellung der Aufteilung einer
Adjazenzmatrix
fur die Parallelisierung von Prims Algorithmus. In jeder Iteration des Algorithmus wird von jedem Prozessor sein Teil des Kostenvektors
aktualisiert. Hierfur wird die Reihe des neu gewahlten Knotens in den zugehorigen Spalten des Prozessors betrachtet und anschließend der lokal optimale Knoten bestimmt. Die Ergebnisse aller Prozessoren werden anschließend gesammelt um den nachsten Knoten des Spannbaums zu bestimmen
Der Algorithmus von Prim ist grundlegend
sequentieller
Natur, da sich die außere
Schleife
aufgrund von Datenabhangigkeiten zwischen den
Iterationen
nicht parallelisieren lasst. Es ist allerdings moglich, die
extract_min
Operation zu parallelisieren. Hierfur kann zum Beispiel eine parallele
Implementierung
einer
Prioritatswarteschlange
verwendet werden. Auf einer
Parallel Random Access Machine
mit insgesamt
Prozessoren
lasst sich der Zugriff auf die Prioritatswarteschlange zu konstanter Zeit beschleunigen
[3]
, sodass sich eine
Gesamtlaufzeit
in
ergibt. Alternativ konnen die
Knoten
zwischen mehreren Prozessoren aufgeteilt werden, sodass jeder Prozessor die eingehenden Kanten zu seinem Teil der Knoten verwaltet.
[4]
Dies wird in folgendem
Pseudocode
dargestellt.
- Weise jedem Prozessor
 einen Teil
einen Teil
 der Knoten, sowie die dazugehorigen (eingehenden) Kanten zu. Bei Verwendung einer
Adjazenzmatrix
entspricht dies gerade einem Teil der Spalten.
der Knoten, sowie die dazugehorigen (eingehenden) Kanten zu. Bei Verwendung einer
Adjazenzmatrix
entspricht dies gerade einem Teil der Spalten.
- Erstelle auf jedem Prozessor einen Vektor
, welcher die aktuellen Kosten fur jeden Knoten in
enthalt. Initialisiere diesen Vektor mit
- Wiederhole folgende Schritte solange nicht alle Knoten im Spannbaum enthalten sind:
- Auf jedem Prozessor: bestimme den Knoten
 und dazugehorige Kante
und dazugehorige Kante
 welcher den minimalen Wert in
besitzt (lokale Losung).
welcher den minimalen Wert in
besitzt (lokale Losung).
- Bestimme aus den lokalen Losungen den Knoten dessen Verbindung zum aktuellen Spannbaum die geringsten Kosten hat. Dies ist mithilfe einer Minimum-Reduktion uber alle Prozessoren moglich.
- Teile jedem Prozessor den gewahlten Knoten mithilfe eines
Broadcast
mit.
- Fuge den neuen Knoten sowie die dazugehorige Kante (es sei denn es handelt sich um den ersten Knoten) dem Spannbaum hinzu
- Auf jedem Prozessor: aktualisiere
indem die Kanten des neu eingefugten Knotens zu dem eigenen Knotenset betrachtet werden.
Diese Variation von Prims Algorithmus lasst sich sowohl auf
Verteilten Systemen
,
[4]
auf
Shared Memory
Systemen
[5]
, sowie auf
Grafikprozessoren
[6]
implementieren. Die
Laufzeit
betragt dabei
 ,
,
da in jeder der
Iterationen des Algorithmus jeweils
 Eintrage betrachtet werden mussen. Zusatzlich wird angenommen, dass sowohl die Minimum-Reduktion als auch der
Broadcast
in
Eintrage betrachtet werden mussen. Zusatzlich wird angenommen, dass sowohl die Minimum-Reduktion als auch der
Broadcast
in
 Zeit durchgefuhrt werden konnen.
[4]
Zeit durchgefuhrt werden konnen.
[4]
Als weitere Alternative fur eine parallele Umsetzung von Prims Algorithmus wurde eine Variante prasentiert, in welcher der sequentielle Algorithmus parallel von verschiedenen Startknoten aus ausgefuhrt wird.
[7]
Im Allgemeinen eignen sich andere
MST
Algorithmen, wie beispielsweise der
Algorithmus von Bor?vka
, jedoch besser fur eine Parallelisierung.
Das folgende Beispiel in der
Programmiersprache
C#
zeigt die Implementierung des Algorithmus von Prim. Bei der Ausfuhrung des Programms wird die
Methode
Main
verwendet, die die Kanten und die
Abstande
auf der Konsole ausgibt. Die
Matrix
fur die Abstande wird in einem zweidimensionalen
Array
vom
Datentyp
Integer
gespeichert.
[8]
using
System
;
class
Program
{
// Diese Methode gibt den Index des Knotens mit dem minimalen Abstand zum Teilgraphen zuruck
static
int
GetMinimumIndex
(
int
[]
distances
,
bool
[]
includedNodes
)
{
int
minimumDistance
=
int
.
MaxValue
;
int
minimumIndex
=
-
1
;
for
(
int
i
=
0
;
i
<
distances
.
Length
;
i
++
)
{
if
(
!
includedNodes
[
i
]
&&
distances
[
i
]
<
minimumDistance
)
{
minimumDistance
=
distances
[
i
];
minimumIndex
=
i
;
}
}
return
minimumIndex
;
}
// Diese Methode verwendet den Algorithmus von Prim und gibt den minimalen Spannbaum zuruck
static
void
Prim
(
int
[,]
distanceMatrix
,
int
numberOfNodes
,
out
int
[]
parent
,
out
int
[]
distances
)
{
parent
=
new
int
[
numberOfNodes
];
distances
=
new
int
[
numberOfNodes
];
bool
[]
includedNodes
=
new
bool
[
numberOfNodes
];
for
(
int
i
=
0
;
i
<
numberOfNodes
;
i
++
)
{
distances
[
i
]
=
int
.
MaxValue
;
includedNodes
[
i
]
=
false
;
}
distances
[
0
]
=
0
;
parent
[
0
]
=
-
1
;
for
(
int
i
=
0
;
i
<
numberOfNodes
-
1
;
i
++
)
{
int
minimumIndex
=
GetMinimumIndex
(
distances
,
includedNodes
);
includedNodes
[
minimumIndex
]
=
true
;
for
(
int
j
=
0
;
j
<
numberOfNodes
;
j
++
)
{
if
(
distanceMatrix
[
minimumIndex
,
j
]
!=
0
&&
!
includedNodes
[
j
]
&&
distanceMatrix
[
minimumIndex
,
j
]
<
distances
[
j
])
{
parent
[
j
]
=
minimumIndex
;
distances
[
j
]
=
distanceMatrix
[
minimumIndex
,
j
];
}
}
}
}
// Hauptmethode, die das Programm ausfuhrt
public
static
void
Main
()
{
int
[,
]
distanceMatrix
=
new
int
[,]
{
{
0
,
2
,
0
,
6
,
0
},
{
2
,
0
,
3
,
8
,
5
},
{
0
,
3
,
0
,
0
,
7
},
{
6
,
8
,
0
,
0
,
9
},
{
0
,
5
,
7
,
9
,
0
}
};
// Deklariert und initialisiert die Matrix mit den Abstanden zwischen allen Punkten als zweidimensionales Array vom Typ int
int
[]
parent
;
int
[]
distances
;
int
numberOfNodes
=
5
;
Prim
(
distanceMatrix
,
numberOfNodes
,
out
parent
,
out
distances
);
Console
.
WriteLine
(
"Kante\tAbstand"
);
// Ausgabe auf der Konsole
for
(
int
i
=
1
;
i
<
numberOfNodes
;
i
++
)
{
Console
.
WriteLine
(
parent
[
i
]
+
" - "
+
i
+
"\t"
+
distanceMatrix
[
i
,
parent
[
i
]]);
// Ausgabe auf der Konsole
}
Console
.
ReadLine
();
}
}
- Robert C. Prim
:
Shortest connection networks and some generalisations
. In:
Bell System Technical Journal
, 36, 1957, S. 1389?1401
- David Cheriton,
Robert Tarjan
:
Finding minimum spanning trees
. In:
SIAM Journal on Computing
, 5, Dezember 1976, S. 724?741
- Ellis Horowitz,
Sartaj Sahni
:
Fundamentals of Computer Algorithms
. In:
Computer Science Press
, 1978, S. 174?183
- ↑
Gerth Stølting Brodal, Jesper Larsson Traff, Christos D. Zaroliagis:
A Parallel Priority Queue with Constant Time Operations
. In:
Journal of Parallel and Distributed Computing
. 49. Jahrgang,
Nr.
1
, 1998,
S.
4?21
.
- ↑
vgl. dazu etwa Ellis Horowitz, Sartaj Sahni:
Fundamentals of Computer Algorithms.
(s. Literatur)
- ↑
Gerth Stølting Brodal, Jesper Larsson Traff, Christos D. Zaroliagis:
A Parallel Priority Queue with Constant Time Operations
. In:
Journal of Parallel and Distributed Computing
. 49. Jahrgang,
Nr.
1
, 1998,
S.
4?21
.
- ↑
a
b
c
Ananth Grama, Anshul Gupta, George Karypis, Vipin Kumar:
Introduction to Parallel Computing
. 2003,
ISBN 978-0-201-64865-2
,
S.
444?446
.
- ↑
Michael J. Quinn, Narsingh Deo:
Parallel graph algorithms
. In:
ACM Computing Surveys (CSUR) 16.3
. 1984,
S.
319?348
.
- ↑
Wei Wang, Yongzhong Huang, Shaozhong Guo:
Design and Implementation of GPU-Based Prim’s Algorithm
. In:
International Journal of Modern Education and Computer Science 3.4
. 2011.
- ↑
Rohit Setia:
A new parallel algorithm for minimum spanning tree problem
. In:
Proc. International Conference on High Performance Computing (HiPC)
. 2009.
- ↑
GeeksforGeeks:
Prim’s Minimum Spanning Tree (MST)