特殊 센서로 段階的 맛 評價
데이터 反映 ‘맛 地圖’ 提供
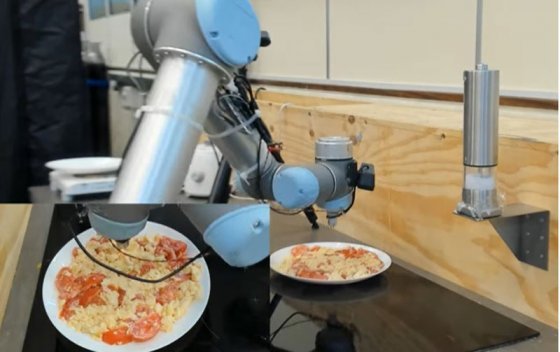 英國 케임브리지對 硏究陣이 開發한 料理 로봇이 스크램블에그와 토마토를 섞으며 最適의 맛 組合을 찾아내고 있다. 人間이 飮食을 씹는 過程에서 느끼는 맛을 最大限 模倣하는 로봇이다. 케임브리지大 提供
英國 케임브리지對 硏究陣이 開發한 料理 로봇이 스크램블에그와 토마토를 섞으며 最適의 맛 組合을 찾아내고 있다. 人間이 飮食을 씹는 過程에서 느끼는 맛을 最大限 模倣하는 로봇이다. 케임브리지大 提供
英國 科學者들이 家電會社 ‘베코(Beko)’와 함께 사람과 가장 비슷한 方式으로 飮食 맛과 鹽度를 測定하는 로봇을 開發했다. 사람이 씹을 때 內容物이 섞이며 다양한 맛을 徐徐히 느끼는 것처럼 段階的으로 맛과 鹽度를 評價하는 方式이어서 훌륭한 料理를 만드는 데 必要한 科學的 데이터를 料理師에게 提供할 것으로 期待를 모은다.
푸미야 리다 英國 케임브리지大 工大 敎授는 사람이 飮食을 攝取할 때처럼 段階的으로 飮食 맛을 評價하는 ‘로봇 셰프’를 開發하고 國際學術誌 ‘로보틱스 및 人工知能(AI) 프런티어스’ 最新號에 公開했다.
人間은 飮食을 씹을 때 飮食의 質感과 맛의 變化를 느낀다. 飮食을 씹는 동안 生成된 침과 消化 酵素는 飮食에 包含된 化合物을 혀에 存在하는 味覺 受容體로 傳達한다. 味覺 受容體 信號는 腦로 傳達되고 腦가 맛을 認識하는 原理다. 단 飮食을 좋아하는 사람과 그렇지 않은 사람이 있는 것처럼 맛은 매우 個人的인 領域으로 分類된다. 훌륭한 料理師는 味覺에 依存해 飮食이 내는 다양한 맛의 均衡을 맞춘다.
硏究陣은 먼저 토마토와 스크램블에그를 섞어 無難한 맛을 내는 오믈렛을 만드는 로봇을 開發했다. 그런 다음 로봇 팔에 鹽度 센서 等을 달아 오믈렛에 들어가는 9가지 組合으로 토마토 個數와 소금量을 바꿔가며 세 次例에 걸쳐 오믈렛의 鹽度와 맛을 測定했다. 人間이 材料를 입에 넣고 씹는 過程에서 飮食 맛을 느끼는 原理를 模倣한 方式이다.
硏究팀은 여기에서 測定한 데이터를 根據로 各 材料의 鹽度와 섞이는 濃度에 따른 맛 地圖를 自動으로 生成해냈다. 로봇이 生成한 맛 地圖를 보고 個人 趣向에 따라 最高의 맛 組合을 갖춘 오믈렛을 만들어 낼 수 있게 된 것이다.
硏究陣은 “食品의 鹽度나 當到를 單純히 체크하는 데 그친 旣存 시스템에서 업그레이드된 技術로, 로봇이 人間처럼 씹고 맛보는 過程을 模倣해 結局 人間이 個人 趣向에 따라 즐길 수 있도록 맛을 調整한 飮食을 만들어 낼 수 있을 것”이라며 “단맛과 기름진 맛까지 맛을 調整할 수 있는 로봇을 開發할 것”이라고 밝혔다.
金玟秀 동아사이언스 記者 reborn@donga.com
